| In English | Accueil/Contact | Billard | Bélier | SNH | Relativité | Botanique | Musique | Ornitho | Météo | Aide |
| Introduction | Piaget | Description | Glossaire | Bibliographie | Sommaire |
Par déclinaison systémique de la théorie de l'apprentissage de Jean Piaget (voir chapitre Piaget), nous proposons ici une description fonctionnelle du Système Nerveux Humain (SNH) pour les deux premières années de la vie du nourrisson. En cohérence avec notre présentation générale (voir chapitre introduction), sont décrits ici les Situations, événements et fonctions de ce SNH.
Remarque : Les auteurs cités dans ce chapitre sont mentionnés entre crochets sous la forme [AUTEUR Titre Page]. Voir Bibliographie.
Avertissement : pour afficher la dernière mise à jour des figures suivantes, pensez à supprimer les "fichiers temporaires" de votre navigateur Internet avant d'accéder à cette page.
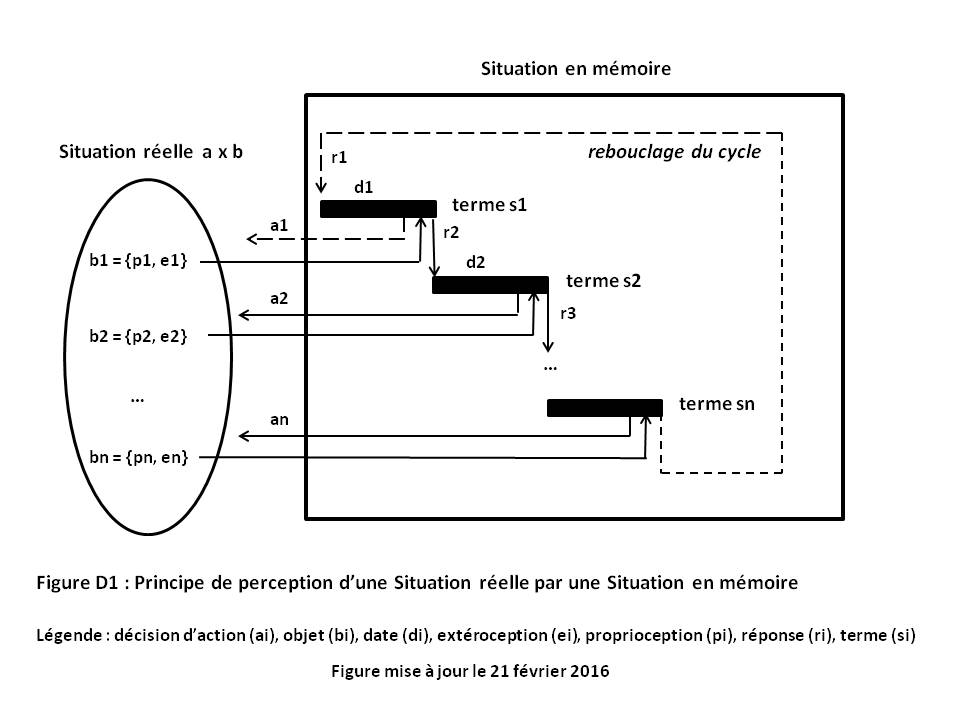
La Figure D1 ci-dessus montre le principe de perception d'une Situation réelle par une Situation en Mémoire.
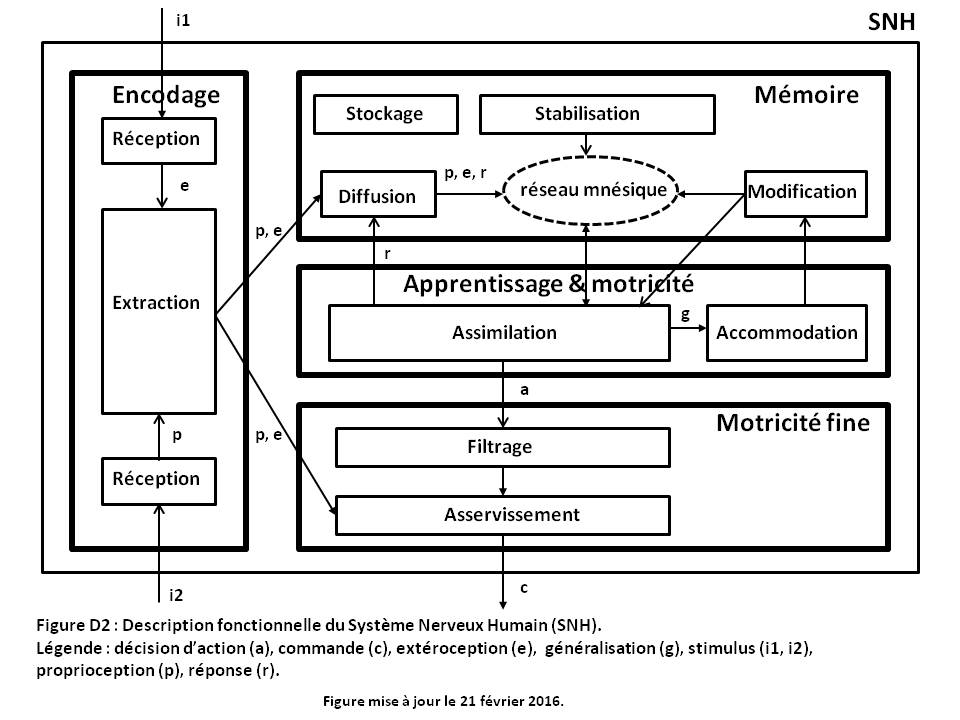
La Figure D2 ci-dessus montre la description détaillée du SNH sous forme de fonctions et processus réparties par Sous-systèmes, à savoir : 1) Fonctions Réception et Extraction pour le sous-système Encodage ; 2) Processus Assimilation et Accommodation pour le sous-système Apprentissage & motricité ; 3) Fonctions Stockage, Diffusion, Modification et Stabilisation pour le sous-système Mémoire ; 4) Fonctions Filtrage et Asservissement pour le sous-système Motricité fine.
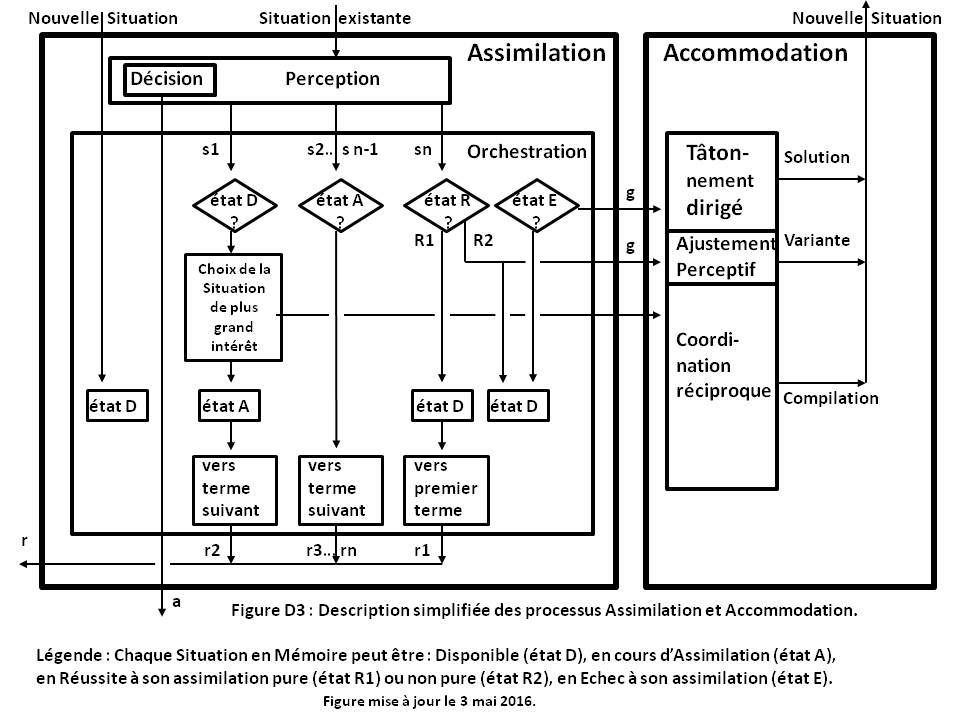
La Figure D3 ci-dessus montre la description simplifiée des Processus Assimilation et Accommodation sous forme de fonctions réparties par processus, à savoir : 1) Fonctions Perception, Orchestration et Décision pour le processus Assimilation ; 2) Fonctions Ajustement perceptif, Tâtonnement dirigé et Coordination réciproque pour le processus Accommodation.
Nous appelons "Situation" en Mémoire, et plus largement "Classe de situations", tout schème d'action au sens de Jean Piaget (voir chapitre Piaget - Organisation en schèmes).
Finalité : Une Situation en Mémoire est une totalité organisée dont le propre est de se conserver en incorporant à elle les objets favorables à son fonctionnement ( "assimilation" ) et de se différencier en s'adaptant aux objets nouveaux ( "accommodation" ).
Structure : Une Situation (S = a x b) en Mémoire est une succession de décisions d'action propre (ai) et d'anticipations perceptives (bi) possédant les propriétés suivantes de totalité organisée (voir Figure D1) :
1- Cycle : enchaînement de termes moteurs (ai) se refermant sur lui-même au point de départ [PIA BC 157, 174][PIA PI 184]) ;
2- Association sensori-motrice : tout terme moteur (ai) est une décision d'action associée solidairement à un tableau perceptif (bi) [PIA BC 170][PIA PI 95, 108, 110][PIA FS 252][SAL 3] ;
3- Simultanéité action-perception : tout terme perceptif (bi) est le résultat attendu immédiat de la décision d'action (ai) [PIA BC 189]) ;
4- Objet (ou tableau perceptif ou photo) : toute réalité (bi) issue du Milieu est composée de proprioceptions (pi) et d'extéroceptions (ei) (voir Chapitre Introduction).
5- Objet "extérieur" : objet du Milieu hors SMA, donc composé uniquement d'extéroceptions (ei).
Notation indicielle :
- L'indice i, seul, est le numéro d'ordre de la variable indicée (Situation, terme, date, événements...). Exemples : Si, si, di, ai, bi, pi, ei
- L'indice i est parfois précédé d'un premier indice correspondant au numéro de Situation. Exemples : s1i, a2i
- Pour les événements, l'indice i est parfois suivi d'un indice j correspondant à la composante de l'événement. Exemples : bij, aij
Observation : Lorsque nous parlons avec quelqu'un, nous avons aussi envie de discuter avec d'autres personnes. Quoi de plus naturel alors que d'échantillonner discrètement le contenu des discussions alentour, via de rapides déplacements de l'attention ? Notre prénom ne capte donc pas réellement notre attention, mais il la retient lorsqu'elle passe par là [Revue Pour la Science - Décembre 2015 - Article "Pourquoi repère-t-on son prénom au milieu des conversations ?" de F. Maquestiaux]
Analogie neuronale : Toute Situation en Mémoire pourrait être un groupement de neurones dont la structure anatomique rendrait compte de cette "totalité organisée".
Analogie cinématographique : Toute Situation en Mémoire s'apparente à la co-existence de deux "films" solidaires et simultanés : un film d' "action" (a) composé de décisions d'action, et un film de "sensation" (b) composé d'extéroceptions (e) et de proprioceptions (p) [PIA PI 131][PIA FS 252].
Exemple n°1 de la Situation-réflexe S = "succion réflexe du nourrisson" :
Action (a) = décision d'action liée à l'action de sucer à vide (pour sucer)
Tableau perceptif (b) = contact (e) avec la lèvre + proprioception (p) liée aux mouvements bucco-labiaux
Exemple n°2 de la Situation S après apprentissage : "succion du sein pour s'alimenter" :
Action (a) = décision d'action liée à l'action de sucer le sein (pour s'alimenter)
Tableau perceptif (b) = douleur forte (e) à l'estomac (grande faim) + proprioception (p) liée à la posture de tétée + contact (e) avec la lèvre + proprioception (p) liée aux mouvements bucco-labiaux + décroissance ou fin (e) de la douleur
Exemple n°3 de la Situation S après apprentissage : "succion du pouce pour tromper la faim" :
Action (a) = décision d'action liée à l'action de sucer le pouce (pour tromper la faim)
Tableau perceptif (b) = douleur faible (e) à l'estomac (petite faim) + proprioception (p) liée à la position de l'ensemble bras-main-pouce + contact (e) avec le pouce + contact (e) avec la lèvre + proprioception (p) liée aux mouvements bucco-labiaux
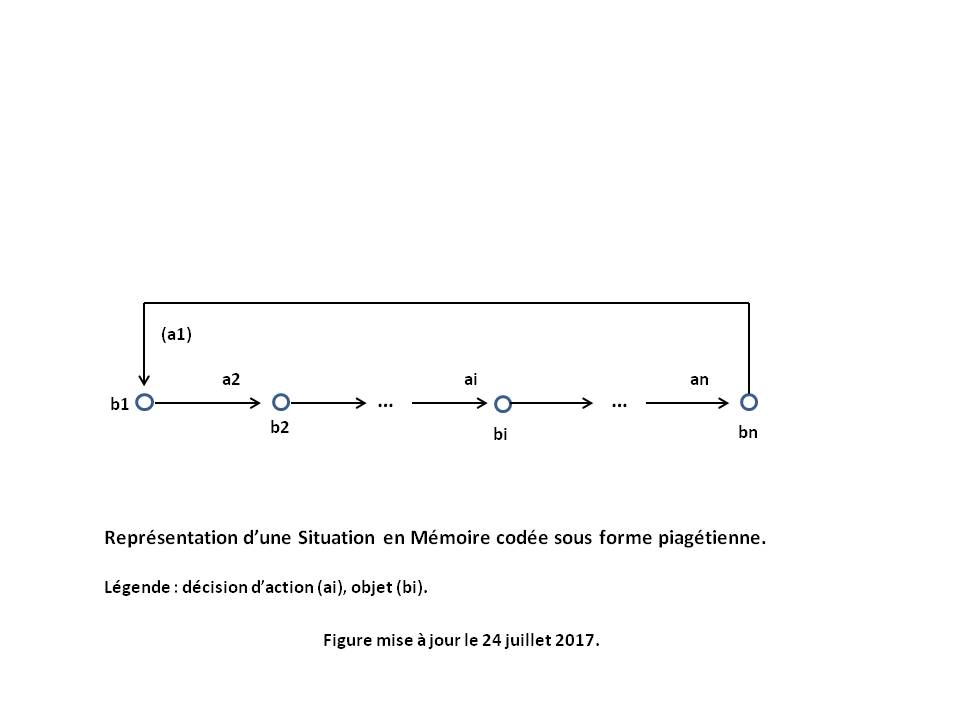
La Figure ci-dessus illustre toute Situation en Mémoire codée sous forme piagétienne.
Si les sigles "x" et "-->" désignent respectivement l'interaction et le résultat de deux images prises dans chaque film à l'instant (ti), alors toute assimilation d'une Situation réelle à une Situation (a x b) en Mémoire peut être discrétisée dans le temps sous la forme piagétienne suivante [PIA BC 157, 169, 174][PIA NI 12][PIA EC 10, 38] :
S = a x b = { (a1) x b1 --> a2 x b2 --> ... --> ai x bi --> ... --> an x bn --> a1 }
où (s1 = a1 x b1) et (sn = an x bn) représentent respectivement le premier et le dernier terme du cycle,
où (ai) et (bi) représentent respectivement le terme moteur et le terme perceptif composant le terme général (si) d'indice (i).
Conformément au principe de "totalité organisée", on peut constater que la perception (bi) prédit la perception suivante (b i+1) et que l'action (a i+1) vise à provoquer le résultat attendu (b i+1) (voir Figure D1).
On appelle "Indice perceptif" (ou "signal" ou "déclencheur" ou "cause" ou "moyen") d'une Situation quelconque la partie perceptive située en tout début de cycle (terme b1) et qui peut déclencher à elle seule le cycle d'assimilation [PIA NI 170][PIA BC 189][PIA RC 237][PIA EC 41]. D'où le terme moteur (a1) noté entre parenthèses.
Au sens Piagétien, cet indice est une donnée sensible qui annonce la présence d'un objet ou l'imminence d'un événement... le hochet que regarde le bébé est indice de préhension virtuelle ; le mamelon que touchent les lèvres du nourrisson est indice de succion possible, etc. [PIA NI 170]
On appelle "But" (ou "effet" ou "résultat" ou "besoin" ou "idéal") la partie perceptive située en fin de cycle (terme bn). Le But est toujours distinct de l'Indice perceptif (b1) et toute Situation comprend donc a minima deux termes.
Le terme (ai) est l'information de consigne en entrée du Sous-Système Motricité fine (voir Chapitre Introduction) qui est en général égale à la proprioception (pi) associée à l'objet (bi) attendu (voir Figure D1).
Dans le cas où l'assimilation des objets au cycle est exacte (assimilation pure), le cycle se conserve tel quel, sans aucune accommodation venant modifier un terme ou un résultat d'interaction.
Dans le cas contraire, le cycle est modifié selon trois cas possibles :
- Accommodation de type ajustement perceptif (modification d'un ou de plusieurs termes perceptifs (bi), sans modification du terme respectif suivant). Le cycle d'assimilation n'est pas rompu. C'est le cas des "petits ajustements" visant à incorporer dans le cycle les variantes des objets (particularités, nuances, détails...). Par exemple, le cycle S peut se transformer en :
S' = { (a1) x b1 --> a2 x b'2 --> a3 x b3... --> ai x bi --> ... --> an x bn --> a1 }
- Accommodation plus importante (substitution d'un ou de plusieurs termes par d'autres). Le cycle d'assimilation est rompu et se transforme de façon à refermer le cycle. C'est le cas du "tâtonnement dirigé" visant à trouver une solution qui referme le cycle à tout prix. Par exemple, le cycle S peut se transformer en :
S' = { (a1) x b1 --> a2 x b2 --> a'3 x b'3... --> a'i x b'i --> ... --> an x bn --> a1 }
- Coordination réciproque (fusion de deux ou plusieurs cycles pour n'en former qu'un)
Toute Situation en Mémoire est caractérisée à tout instant par :
- Un Type de Situation lié à la Fonction Représentation et pouvant être : sensori-mo(T)eur ou (M)ental.
- Un Etat de stabilisation lié à la Fonction Stabilisation et pouvant être : Nouvellement créé (stockage provisoire) ou Stabilisé (stockage définitif)
- Un Etat d'assimilation lié à la Fonction Orchestration et pouvant être :
Etat D : Disponible pour assimilation immédiate
Etat C : Candidat à son assimilation
Etat A : Assimilation en cours
Etat R : en Réussite à son assimilation (fermeture du cycle d'assimilation)
Etat R1 : en réussite à son assimilation pure (assimilation exacte des objets au cycle)
Etat R2 : en réussite à son assimilation non pure (assimilation approximative d'un ou plusieurs objets au cycle)
Etat E : en Echec à son assimilation (rupture du cycle d'assimilation)
- Un ensemble de Niveaux d'intérêt (et de désintérêt) lié à la Fonction Orchestration et fonction de l'expérience acquise sur le même plan sensori-moteur ou mental que celui de la Situation. Cet ensemble peut être :
* Niveau d'habitude (Uh) : taux de réussite à l'assimilation de la Situation pour tous les cas où elle est élue au titre de Situation de plus grand Intérêt. Ce taux est compris entre 0 % et 100 %. A la création de la Situation, ce taux peut être initialisé, par exemple, à la valeur 1/2.
* Niveau d'incidence mentale (Ui) : ce niveau, défini au plan sensori-moteur, est fonction de l'expérience acquise sur le plan mental en lien avec ce plan sensori-moteur. Le Niveau d'incidence mentale d'une Situation sensori-motrice est le taux de réussite à l'assimilation de toutes les Situations mentales en lien filial avec cette Situation pour tous les cas où ces Situations mentales sont élues au titre de Situation de plus grand Intérêt. Ce taux est compris entre 0 % et 100 %. A la création de la Situation sensori-motrice, ce taux peut être initialisé, par exemple, à la valeur 0.
* Niveau de saturation (Us) : taux de réussite à l'assimilation pure de la Situation pour tous les cas de réussite à son assimilation pure ou non pure. Ce taux est compris entre 0 % et 100 %. A la création de la Situation, ce taux peut être initialisé, par exemple, à la valeur 1/2.
* Niveau de danger (Ud) : taux global représentatif de l'ensemble des informations nociceptives prévisibles composant la Situation, c'est-à-dire relatives uniquement au But de la Situation. Toute valeur de Ud est comprise entre 0 % (Situation totalement neutre) et 100 % (Situation extrême).
- Pour toute Situation de Type mental, des liens de filiation avec les Situations de Type sensori-moteur ayant contribué à sa création (voir Fonction Stockage).
Le SNH possède initialement un nombre limité de Situations-réflexes susceptibles de s'étendre et de rendre compte de l'ensemble des conduites futures.
Ces Situations peuvent se classer comme suit (inspiré de [PAI 1971 Déterminants 281]) :
Situation Sensori-motrice : Présence d'une douleur ou d'une agression --> action visant à supprimer la douleur ou l'agression
Exemples :
Estomac douloureux (grande faim) --> crier et remuer
Contact douloureux avec un membre --> contracter les muscles fléchisseurs du membre tout en inhibant ses muscles extenseurs (réflexe de flexion ou de retrait) [LIM Neurophysiologie 60]
Contact très douloureux avec un membre --> contracter en plus les muscles extenseurs du membre controlatéral tout en inhibant leurs muscles fléchisseurs (réflexe d'extension croisée) [LIM Neurophysiologie 61]
Muscle douloureux (fatigue) --> freiner en permanence le mouvement des organes moteur en lien avec le muscle
Eblouissement --> cligner les paupières (réflexe palpébral à l'éblouissement)
Bruit intense --> cligner les paupières (réflexe cochléo- ou auriculo-palpébral)
Contact (douloureux) avec un cil ou la cornée de l'oeil --> cligner les paupières (réflexe palpébral ciliaire et cornéen)
Contact (douloureux) avec une butée articulaire --> arrêter le mouvement des organes moteurs en lien avec la butée
Corps étranger dans narine --> rejeter le corps en éternuant
Cycle : S = { (a1) x b1 --> a2 x b2 --> a1 }
b1 = douleur (e1) ou présence d'un objet en un lieu protégé
d2 = date (valeur selon type de réaction)
a2 = action de défense et/ou d'alerte
b2 = fin de la douleur ou du corps étranger (e2)
a1 = aucune action
Situation Sensori-motrice : Perte d'équilibre (postural, visuel...) --> action visant à compenser le déséquilibre
Exemples :
Corps incliné brusquement vers le bas --> redresser la tête [PUR Neurosciences 258]
Tête brusquement redressée (flexion dorsale) --> étendre les membres antérieurs et fléchir les membres postérieurs [PUR Neurosciences 258]
Tête tournée lentement ou brusquement --> tourner les yeux en sens opposé du mouvement afin de garder l'image rétinienne au même endroit (réflexes optocinétique pour mouvement lent et vestibulo-oculaire pour mouvement rapide) [PUR Neurosciences 256, 366]
Image floue --> régler le cristallin afin de faire la mise au point de l'image rétinienne [PIA NI 64][PUR Neurosciences 179, 366]
Image floue --> régler la pupille à l'éclairement afin d'améliorer la netteté de l'image rétinienne [PIA NI 61][PUR Neurosciences 180, 366]
Image dédoublée --> régler la convergence binoculaire [PIA NI 64][PUR Neurosciences 365]
Butée articulaire en approche --> freiner puis inverser le mouvement
Cycle : S = { (a1) x b1 --> a2 x b2 --> a1 }
b1 = perte d'équilibre (e1 ou p1)
d2 = date (valeur selon type de réaction)
a2 = action de compensation du déséquilibre
b2 = fin de la perte d'équilibre (e2 ou p2)
a1 = aucune action
Remarque : Le mouvement de retour à l'équilibre est analogue au mouvement de capture (voir plus loin) dont l'objet, la fovéa et la surface de repérage seraient respectivement un simple tableau perceptif, le point d'équilibre et la plage admissible du déséquilibre.
Situation Sensori-motrice : Présence d'un objet sur une surface de repérage, fovéa excluse (exemples : rétine, couple d'oreilles, peau externe, oesophage) --> action visant à annuler l'écart spatial entre l'objet et la fovéa de la surface [PAI 1971 Déterminants 281][PAI 1992 Déterminants 31][PAI 1978 Coordination 234][PUR Neurosciences 236]
Exemples :
Tache lumineuse vue --> regarder la tache en déplaçant la fovéa rétinienne de l'oeil vers la tache (mouvement oculaire de types saccade et poursuite continue) [[PUR Neurosciences 365]
Son entendu --> écouter le son en tournant l'axe de la tête vers la source sonore
Contact douloureux avec la peau du corps --> saisir le contact en déplaçant la main vers le contact
Contact avec la paume de la main --> saisir le contact en fermant la main (réflexe d'aggrippement ou de "grasping")
Contact avec la joue --> baiser le contact en tournant tête et bouche vers le contact (réflexe dit "des points cardinaux")
Contact avec la lèvre --> sucer le contact avec transport vers la gorge
Contact avec l'intérieur de la gorge --> déglutir le contact avec transport vers l'estomac
Objet vu --> amener la main en direction de l'objet (réflexe de coordination oeil-main)
Cycle : S = { (a1) x b1 --> a2 x b2 --> a1 }
b1 = forme spatiale (objet e1) + lieu hors fovéa (écart fovéal non nul e1)
d2 = date (valeur selon type de capture ; exemple : d2 = 0 pour une capture visuelle)
a2 = action d'annulation de l'écart fovéal
b2 = même forme spatiale (objet e2 = objet e1) + fovéa atteinte (écart fovéal e2 = 0)
a1 = aucune action
Enchaînement de captures : L'Echec de la capture produit souvent, par tâtonnement dirigé, une succession de captures identiques, mais à mouvements de plus en plus petits, qui fait converger rapidement vers la réussite. Cette convergence naturelle nécessite que les référentiels proprioceptif et extéroceptif de la surface de repérage soient en homologie. Voir plus loin le paragraphe "Propriétés des Situations-réflexes".
Situation Sensori-motrice : Posture prolongée imposée par le Milieu --> action de conservation de la posture visant à favoriser les assimilations à venir
Exemples :
Mise en position de tétée --> conserver activement la posture
Cycle : S = { (a1) x b1 --> a2 x b2 --> a1 }
b1 = tableau perceptif (p) imposé par le Milieu, sans aucune consigne (a) associée présente au niveau Asservissement
d2 = date
a2 = action de maintien de la posture
b2 = même tableau perceptif (p)
a1 = aucune action
Situation Sensori-motrice : Présence prolongée d'un objet sur la fovéa d'une surface de repérage --> action visant à favoriser les opportunités de capture à venir en déplaçant la fovéa vers sa position de repos
Remarque : La position de repos est une position proprioceptive située généralement à mi-chemin entre les positions extrêmes possibles.
Exemples :
Tache lumineuse focalisée --> ramener le regard droit devant et à l'infini
Son focalisé --> ramener l'axe de la tête dans l'axe du corps
Cycle : S = { (a1) x b1 --> a2 x b2 --> a1 }
b1 = forme spatiale (objet e1) située sur fovéa (écart fovéal nul e1)
d2 = date
a2 = action de déplacement de la fovéa vers sa position de repos
b2 = position de repos (p2) atteinte
a1 = aucune action
Situation Sensori-motrice : Articulation en position de repos --> action visant à atteindre l'une des deux butées articulaires puis à revenir en position de repos origine
Exemples :
Poignet au repos, à mi-chemin de son débattement longitudinal maximal --> tourner le poignet jusqu'à sa butée (rotation aller) et revenir à la position de repos origine (rotation retour)
Cycle : S = { (a1) x b1 --> a2 x b2 --> a1 }
b1 = articulation en position de repos (p1 médian) et atteinte avec un sens de rotation donné (sens de a1)
d2 = date (d2 = 0 en général)
a2 = action de rotation de l'articulation dans ce même sens et vers sa butée articulaire
b2 = butée articulaire atteinte (p2)
d1 = date (d1 = 0 en général)
a1 = action de rotation inverse de l'articulation vers sa position de repos origine (p1 médian)
Enchaînement d'exercices articulaires : La succession naturelle de deux mouvements d'exercice articulaire permet de balayer dans chaque sens tout l'espace angulaire séparant les deux butées articulaires.
Situation Sensori-motrice : Absence d'objet sur une surface de repérage, fovéa incluse --> action visant à favoriser la capture d'un objet en déplaçant librement la fovéa ou en créant un contact sur la surface de repérage
Remarque : Ce "tâtonnement pur" (exploration non systématique, au hasard) ne doit pas être confondu avec le "Tâtonnement dirigé" qui s'inscrit dans le mécanisme d'accommodation.
Exemples :
Aucune tache lumineuse sur la fovéa rétinienne de l'oeil --> rechercher toute tache en déplaçant la fovéa (balayage en horizontal et vertical)
Aucun son dans l'axe de la tête --> rechercher tout son en tournant l'axe de la tête (balayage en azimut et en élévation)
Aucun contact avec la main --> rechercher tout contact avec elle en remuant le bras (balancement à vide)
Aucun contact avec l'intérieur de la gorge et petite faim (douleur faible à l'estomac) --> rechercher tout contact avec l'intérieur de la gorge en fermant les lèvres (pour déclencher une succion à vide)
Cycle : S = { (a1) x b1 --> a2 x b2 --> a1 }
b1 = aucun objet (e1) sur la surface de repérage, fovéa incluse
d2 = date
a2 = action de déplacement libre de la fovéa ou de création d'un objet sur la surface de repérage
b2 = forme spatiale (objet e2) sur la surface de repérage ou sur sa fovéa
a1 = aucune action
Enchaînement de recherches libres : L'Echec de la recherche libre produit souvent, par tâtonnement dirigé, une succession de recherches libres identiques, mais à mouvements différents par rapport aux précédents, qui fait converger statistiquement vers la réussite. Le SNH possède donc un catalogue de mouvements rythmiques innés réalisables par son SMA (exemple : balayage de l'oeil en horizontal et vertical, balayage de la tête en azimut et élévation, balancement des membres).
Observation : "Je crois que le bébé naît avec un système de contrôle interne pour balayer visuellement l'espace, système qui est fonctionnel dans le noir, mais qu'à la lumière, il passe sous un autre système de contrôle : extérieur [HER Aube 94]."
Situation Mentale : Situation Sensori-motrice stabilisée et en réussite à son assimilation pure --> attente d'une autre Situation Sensori-motrice stabilisée et en réussite à son assimilation pure
Remarque : Cette Situation-réflexe est totalement indépendante de l'activité propre du SNH (pas de décisions d'action a1 et a2) et aussi sans rebouclage du cycle sur le premier terme b1. Elle est la base des futures Situations mentales utilisées dans la fonction Représentation.
Exemples :
Son entendu et écouté --> tache lumineuse vue et regardée
Cycle : S = { b1 --> b2 }
b1 = perception du dernier terme d'une Situation sensori-motrice (type T), stabilisée (Etat S) et en réussite à son assimilation pure (Etat R1)
d2 = date inter-termes b1-b2 de la Situation réflexe et aussi inter-Buts des deux Situations Sensori-motrices déclencheuses
b2 = perception du dernier terme d'une autre Situation sensori-motrice (type T), stabilisée (Etat S) et en réussite à son assimilation pure (Etat R1)
Pour que les Situations-réflexes soient susceptibles de s'étendre et de rendre compte de l'ensemble des conduites futures, elles doivent avoir nécessairement les propriétés suivantes :
1- Situations-réflexes permettant la reproduction de tous les mouvements du SMA, qu'ils soient propres ou imposés par le Milieu. Les actions (a1) et (a2) doivent être définies et mémorisées dans un référentiel perceptif et non moteur. Voir fonction Décision.
2- Situations-réflexes exploitables par les fonctions Ajustement perceptif, Tâtonnement dirigé et Coordination réciproque. Les actions (a1) et (a2) doivent être définies et mémorisées dans un référentiel perceptif de type proprioceptif et non extéroceptif.
3- Situations-réflexes favorisant la réussite du tâtonnement dirigé. L'action (a2) associée au But (b2) doit toujours rapprocher de ce But. Pour cela, le référentiel proprioceptif doit être en homologie avec le référentiel extéroceptif et le tâtonnement doit faire converger vers le But perdu. Dans le cas du mouvement de capture, on peut choisir avantageusement par exemple la loi de convergence suivante :
a2 = p2 = p1 + Kpe e1
où Kpe est le taux de conversion entre proprioception (p) et extéroception (e).
Pour une meilleure réussite vers le But, la vitesse prévue (da2/dt) pour l'action peut être d'autant plus grande que le But est excentré et mouvant, ce qui peut s'écrire par exemple :
(da2/dt) = (dp2/dt) = (dp2/dt mini) + J e1 ((de1/dt).(de1/dt))
où J est un coefficient.
4- Situations-réflexes enchaînables avec d'autres, permettant l'apparition de conduites globales. Toute Situation-réflexe réussie S1 doit favoriser le déclenchement d'une autre Situation-réflexe S2. Dans le cas du mouvement de capture, le contact avec la joue provoque la recherche du baiser du contact, d'où nouveau contact éventuel avec la lèvre qui provoque le transport du contact vers la gorge, d'où nouveau contact avec l'intérieur de la gorge qui provoque le transport vers l'estomac, etc. Cette chaîne de réflexes rend ainsi compte d'une conduite globale alimentation-digestion.
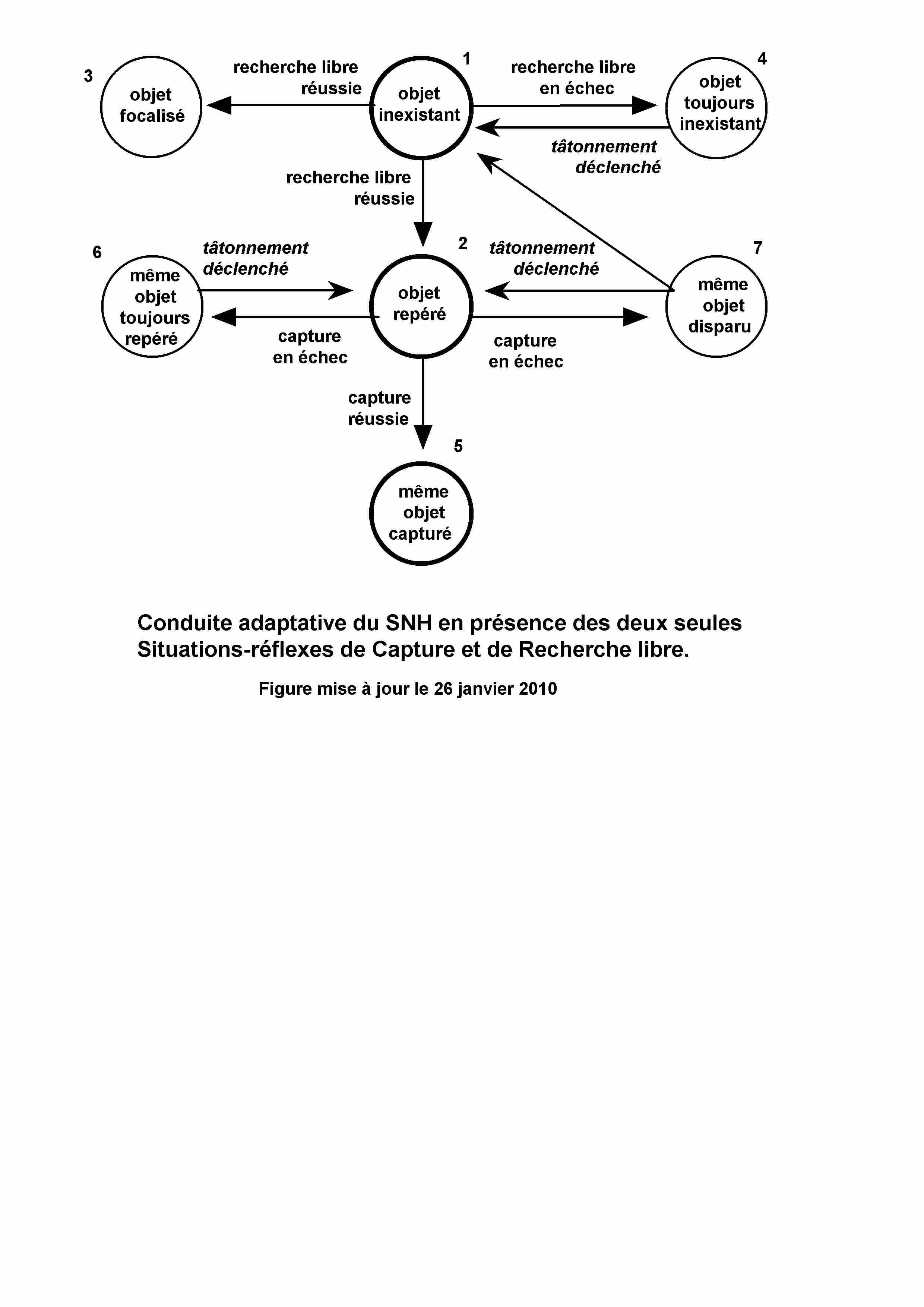
La Figure ci-dessus illustre, sous forme d'un graphe orienté, la conduite adaptative du SNH en présence des deux seules Situations-réflexes de Capture et de Recherche libre.
Tout objet inexistant (1) sur une surface de repérage (fovea incluse) provoque le mouvement de Recherche libre dont le résultat peut être : 2- objet repéré sur la surface (fovéa excluse), 3- objet focalisé (sur la fovéa), 4- objet toujours inexistant. L'échec 4 déclenche le tâtonnement dirigé à partir de 1. La réussite 3 ne provoque rien de plus. La réussite 2 provoque le mouvement de Capture dont le résultat peut être : 5- même objet capturé (sur fovéa), 6- même objet toujours repéré sur la surface (fovéa excluse), 7- même objet disparu. Le cas réussi 5 ne provoque rien de plus. Le cas d'échec 6 déclenche le tâtonnement dirigé à partir de 2. Le cas d'échec 7 déclenche le tâtonnement dirigé, soit à partir de 1, soit à partir de 2.
On appelle "événement" toute information échangée entre fonctions du SNH (voir Figure D2). Un événement peut être de type :
(a) décision d'action : événement moteur produit par la Fonction Décision et rendant compte des décisions de mouvement.
(b) objet ou tableau perceptif : événement perceptif interne à la Fonction Perception. Pour tout terme (si) d'une Situation, l'objet (bi) est un ensemble de composantes (bij), chaque composante étant un événement perceptif de type extéroception (e) ou proprioception (p).
(d) date : événement temporel interne à la Fonction Perception. Pour tout terme (si) d'une Situation, la date (di) est l'intervalle de temps qui sépare la perception du terme (si) relativement à la perception du terme (s i-1). La date réelle ou attendue est un nombre de secondes supérieur ou égal à 0.
(e) extéroception primaire : événement perceptif produit par la Fonction Réception et rendant compte des positions et mouvements propres des ASTP (exemples : pression tactile, intensité lumineuse, fréquence sonore, douleur). Toute valeur de e est comprise entre 0 (seuil de sensibilité du récepteur) et 1 (seuil de saturation du récepteur).
(e) extéroception élaborée : événement perceptif produit par la Fonction Extraction à partir d'extéroceptions primaires et rendant compte des formes, positions et mouvements des objets du Milieu (exemples : tache lumineuse, sa position rétinienne par rapport à la fovéa, sa vitesse dans une direction donnée, position directionnelle d'une source sonore par rapport à l'axe de la tête). Toute valeur de e est comprise entre 0 (seuil de sensibilité de l'extracteur) et 1 (seuil de saturation de l'extracteur).
(h) inhibition : événement produit par une Situation en Mémoire et venant empêcher l'assimilation possible d'une autre Situation pendant un laps de temps donné.
(l) paramétrage : événement produit par le sous-système Apprentissage & motricité et pouvant modifier les paramètres intrinsèques d'une fonction (exemples : réglage proactif de la sensibilité des Organes Récepteurs, modification de la réceptivité du réseau neuronal, modification des seuils de la fonction Perception).
(p) proprioception primaire : événement perceptif produit par la Fonction Réception et rendant compte des positions et mouvements propres du SMA (exemples : tension musculo-tendineuse, butée articulaire). Toute valeur de p est comprise entre 0 (seuil de sensibilité du récepteur) et 1 (seuil de saturation du récepteur), et se mesure par rapport à une référence origine propre au SMA (exemple : tension nulle).
(p) proprioception élaborée : événement perceptif produit par la Fonction Extraction à partir de proprioceptions primaires et rendant compte des formes, positions et mouvements des objets du Milieu (exemples : position directionnelle des forces de gravité par rapport à l'axe de la tête, position et vitesse d'un avant-bras par rapport au bras). Toute valeur de p est comprise entre 0 (seuil de sensibilité de l'extracteur) et 1 (seuil de saturation de l'extracteur).
(r) réponse : événement perceptif produit par la Fonction Perception et rendant compte du taux de reconnaissance d'une Situation rélle par les Situations en Mémoire. Toute valeur de la réponse (ri) relative au terme (si) de la Situation est comprise entre 0 (perception minimale) et 1 (perception parfaite).
Le SNH peut se décomposer arbitrairement en un nombre limité de fonctions, dans la mesure où :
- leur interfonctionnement rend compte de toutes les éléments précédents (voir chapitres Introduction et Piaget),
- leur interfonctionnement n'induit aucun inter-blocage entre processus ou fonctions (à vérifier formellement).
Nous avons choisi les fonctions suivantes, réparties par sous-systèmes (voir Figure D2) :
Cette fonction convertit les stimulus en événements perceptifs de type extéroception primaire (e) ou proprioception primaire (p).
La loi de conversion entre l'intensité (i) d'un stimulus et l'information (b) de sortie de l'Organe Récepteur (b = e ou p) peut être par exemple la loi de puissance, dite "loi de Stevens" [BAG Information 30][NOR Traitement 686], après normalisation unitaire de la sortie (b = 0 à 1) :
plage (i < imin) : aucune conversion
plage (i > imin) et (i < imax) : alors b = [ (i - imin) / (imax - imin) ]q
plage (i > imax) : alors b = 1
où imin et imax sont respectivement le seuil de sensibilité et le seuil de saturation de l'Organe Récepteur,
où l'exposant q est la puissance de conversion,
ces trois paramètres étant fonction de la modalité sensorielle et de l'adresse géographique de l'Organe Récepteur.
L'avantage de la formulation de Stevens est son caractère très général. La loi est facilement vérifiée pour les différentes modalités sensorielles [BAG Information 32].
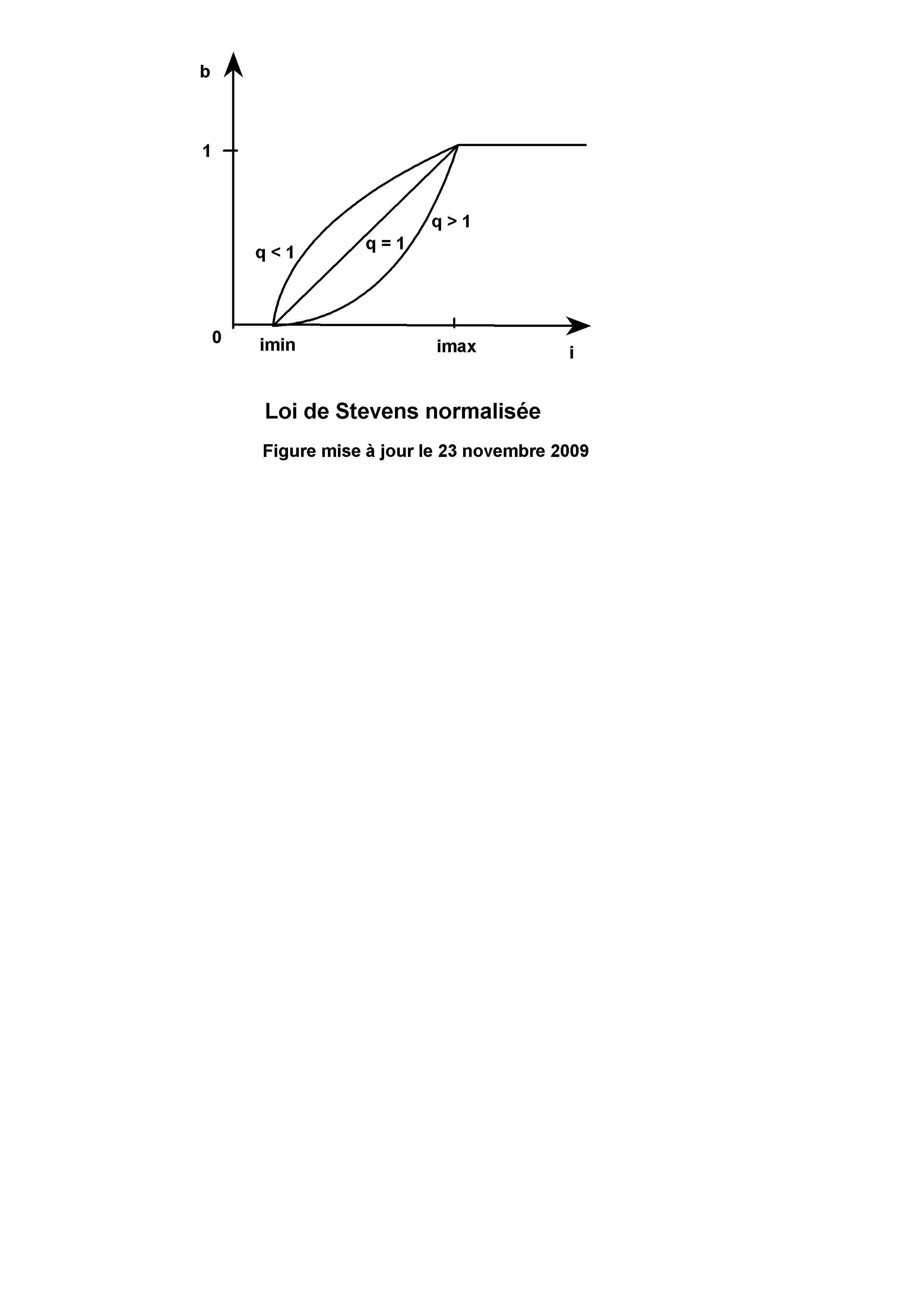
La Figure ci-dessus illustre la loi de Stevens normalisée, sous forme d'un graphique b = f(i).
On y retrouve les trois plages de valeurs pour l'abscisse i. Pour la plage centrale ((i > imin) et (i < imax)), on remarquera la forme des trois courbes croissantes possibles selon la puissance de conversion q. Pour la dernière plage (i > imax), on notera le palier correspondant à la saturation de l'Organe Récepteur.
Exemple de puissance de conversion (q) :
0,3 pour une luminosité détectée par l'oeil
0,5 pour une odeur de café détectée par le nez
0,6 pour une pression sonore à l'oreille
1,0 pour un point froid sur le bras
1,3 pour un goût de sel sur la langue
1,4 pour une masse soupesée par la main
1,6 pour un point chaud sur le bras
1,7 pour une force produite par la main
3,5 pour un stimulus électrique sur la peau
En sus de cette loi de conversion, chaque Organe Récepteur possède un type de fonctionnement qui peut être : "tonique" ou "à adaptation lente" correspondant à un fonctionnement en continu ; "phasique" ou "à adaptation rapide" correspondant à un fonctionnement uniquement au début (effet "ON" avec b = 1) et à la fin de la stimulation (effet "OFF" avec b = 0) [PUR Neurosciences 149][LIM Neurophysiologie 48].
Cette fonction produit des événements perceptifs de type extéroception élaborée (e) et proprioception élaborée (p) respectivement à partir d'événements perceptifs de type extéroception primaire et proprioception primaire.
Chaque événement perceptif élaboré code une valeur ou une plage de valeurs caractérisant un ensemble cohérent d'événements perceptifs primaires.
Exemple : valeur de 30 % caractérisant la vitesse de translation verticale ascendante (en pixels par seconde) d'une tache lumineuse se déplaçant sur la rétine.
Remarque : Cette fonction est en fait un ensemble inné de modules de traitements hautement spécialisés.
Observation : La voie visuelle primaire part de la rétine, va au corps genouillé latéral dorsal du thalamus, puis au cortex visuel primaire. A chaque station de la voie visuelle primaire, les neurones individuels sont spécifiquement accordés pour extraire et coder différents types d'information visuelles, tels que le contraste, la couleur, la forme et le mouvement... Le morcellement des fonctions continue dans les voies qui mènent du cortex visuel primaire aux aires extrastriées et au cortex d'association du lobe temporal et du lobe pariétal [PUR Neurosciences 199].
Ce Sous-système met en oeuvre deux processus complémentaires et antagonistes (voir Figure D3) :
- Le processus Assimilation reconnaît (r) les Situations réelles (externes) en fonction des Situations existantes en Mémoire, les généralise (g) si besoin est, et produit des décisions d'action (a) orientées dans le sens de la répétition des conduites acquises.
- Le processus Accommodation modifie (m) les Situations existantes en Mémoire par insertion de mouvements nouveaux (a) et de sensations nouvelles (e et p) pour les cas nécessitant de petits ajustements (Ajustement perceptif), des ajustements plus importants (Tâtonnement dirigé) ou des coordinations entre cycles indépendants (Coordination réciproque).
Au sens Piagétien, ce sous-système revient à toujours aller vers le connu et à n'explorer l'inconnu qu'en cas d'échec de cette démarche.
Remarque : ce Sous-système peut englober avantageusement la fonction Langage, laquelle assure l'apprentissage des mots et la motricité des organes vocaux du SMA.
Ces deux processus sont basés sur les fonctions suivantes :
Cette fonction tend à établir une solidarité toujours plus étroite entre les deux processus. D'un côté, l'Accommodation fait croître le nombre de Situations assimilables selon une progression que modère l'Assimilation par confirmation des Situations nouvellement créées. De l'autre, l'Assimilation fournit le support mnésique sensoriel et moteur que modifie l'Accommodation par ajustement perceptif, tâtonnement dirigé et coordination réciproque.
Cette fonction rend compte avantageusement des conduites d'adaptation (équilibre entre assimilation et accommodation), de jeu (assimilation primant l'accommodation) et d'imitation (accommodation primant l'assimilation).
Cette fonction ne s'ajoute pas aux autres fonctions du sous-système Apprentissage & motricité. C'est une fonction implicite résultant de leur interaction, avec oscillation lente entre les trois conduites précitées (à démontrer formellement).
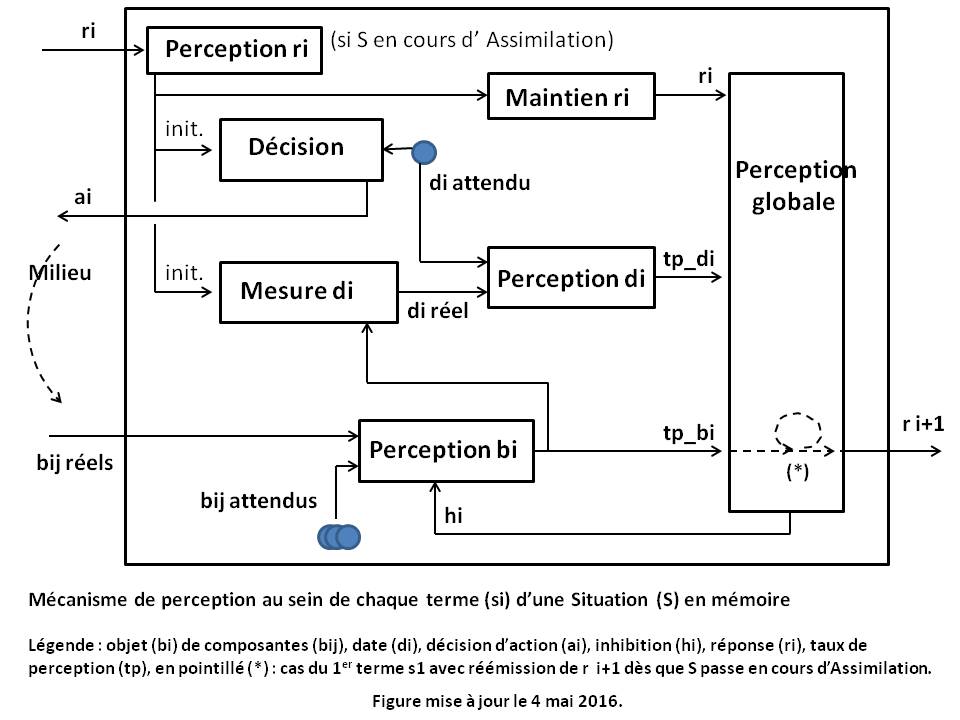
La Figure ci-dessus montre le mécanisme de perception au sein de chaque terme d'une Situation en Mémoire.
Cette fonction compare toute Situation réelle aux Situations en Mémoire et produit un taux de perception en sortie de chaque terme reconnu tenant compte des trois dimensions causale, spatiale et temporelle.
Cette fonction est avantageusement tolérante aux écarts entre Situation réelle et Situation attendue pour les cas courants de composantes d'objet floues (valeur ou "silence" inattendu) ou de dates imprécises (avance ou retard inattendu).
Mécanisme :
Tout terme (si) d'une Situation (S) quelconque en Mémoire est sollicité en reconnaissance au niveau causal (réponse afférente ri), spatial (objet bi) et temporel (date di), et produit éventuellement un événement perceptif (réponse efférente r i+1).
La perception du terme (si) se fait selon cinq étages successifs de traitement (voir Figure ci-dessus) :
1- Causalité : La structure de S est telle que la réponse (ri) du terme (s i-1) est à destination exclusive du terme (si) qui suit le terme (s i-1) dans le cycle d'assimilation de S. Dans le cas où la Situation est en cours d'Assimilation (Etat A), la réponse (ri) afférente au terme (si) est perçue et maintenue active durant tout le temps où aucune réponse (ri) nouvelle n'est perçue. Dans le cas contraire, la réponse (ri) n'est pas perçue.
2- Espace : En présence d'un objet réel (bi), ses composantes (bij réels) sont comparées aux composantes attendues (bij attendus). Les résultats de chacune de ces comparaisons (entre 0 et 1) sont sommés. Le rapport de cette somme au nombre de composantes attendues est seuillé (seuil fp_bi) et produit éventuellement un taux de perception tp_bi.
3- Temps : La perception de la réponse (ri) initialise et lance deux compteurs de temps. Le premier compteur s'arrête dès que la date attendue est atteinte (di attendu) et produit une décision d'action (ai) dont les composantes (aij) sont en général égales à celles de la proprioception attendue (pij attendus) - Voir Fonction Décision. Le second compteur mesure la date réelle (di réel) dès qu'un objet (bi) est perçu. La date réelle est comparée à la date attendue. Le résultat de la comparaison (entre 0 et 1 en valeur absolue) est seuillé (seuil fp_di) et produit éventuellement un taux de perception tp_di.
4a- Perception globale Causalité-Espace-Temps : Les trois taux de perception causale (ri maintenu), spatiale (tp_bi) et temporelle (tp_di) sont sommés ; le rapport de cette somme au nombre 3 est seuillé (seuil fp_si) et produit éventuellement un événement de type réponse (r i+1). La réponse (r i+1) est en outre positionnée par rapport à un seuil d'assimilation pure (fp_pure).
4b- Perception globale dans le cas particulier du 1er terme : Lorsque la Situation S est Disponible (Etat D), la perception globale de son premier terme (si = s1) représente la perception de l'Indice perceptif de la Situation et produit un événement de type réponse (r2) égal au taux de perception (tp_b1) de l'objet b1. Dès que la Situation passe éventuellement en cours d'Assimilation (Etat A), cette même réponse est réémise en sortie de perception globale afin de solliciter correctement le terme s2 au sein de la Situation avec le nouvel Etat A.
5- Inhibition : La réponse (r i+1) inhibe toute perception ultérieure de l'objet (bi) durant tout le temps où la Situation ne redevient pas disponible (Etat D).
Propriétés remarquables :
- Au sein du terme (si), la perception de la date (di) nécessite que causalité (ri) et objet (bi) soient tous deux perçus.
- La perception du terme (si) échoue systématiquement dans les deux cas suivants :
- Objet attendu et non présent. C'est le cas de la perception d'une causalité (ri) non suivie de la perception d'un objet (bi) dans le délai maximum de perception (fp_di_max).
- Objet présent et non attendu. C'est le cas de la perception d'un objet (bi) non précédée de la perception d'une causalité (ri) dans le temps (di), en dehors du seul cas légitime de perception d'un premier terme (s1) au sein d'une Situation Disponible (Etat D).
Valeur des seuils :
- Seuil (fp_bi) de perception minimale de l'objet bi : seuil en-dessous duquel aucun taux de perception tp_bi n'est produit. Ce seuil est fixé à la valeur de 30 % pour les besoins de la Fonction Généralisation.
- Seuil (fp_di) de perception minimale de la date di : seuil en-dessous duquel aucun taux de perception tp_di n'est produit. Ce seuil est fixé à la valeur de 30 % pour les besoins de la Fonction Généralisation.
- Seuil (fp_si) de perception minimale du terme si : seuil en-dessous duquel aucune réponse (r i+1) n'est produite. Ce seuil est fixé à la valeur de 40 % afin que la perception seule de ri ou de bi ne puisse déclencher la réponse (r i+1).
- Seuil (fp_pure) de perception pure du terme si : seuil au-dessus duquel le terme (si) est perçu de façon exacte (assimilation pure) et en dessous duquel la perception est approximative (assimilation non pure). Ce seuil est fixé à la valeur de 95 % pour les besoins de la Fonction Ajustement perceptif.
- Délai maximum (fp_di_max) de perception du terme si : date maximum pendant lequel le terme (si) peut être perçu depuis l'apparition de la réponse afférente (ri). Ce délai est fixé à la valeur (1 + 2 di attendu) en secondes.
Au sens Piagétien, le stade 1 du nourrisson (Exercice des réflexes sans mémorisation des tableaux perceptifs) correspond à une étape immature pour laquelle on aurait : fp_pure = fp_si (voir Grandes étapes du développement).
Cette fonction pilote à chaque instant l'assimilation des Situations en Mémoire et comporte les sous-fonctions suivantes :
Remarque : Cette fonction induit avantageusement des conduites d'attrait pour la nouveauté découverte ou le But perdu, de "regard alternatif" entre objets d'intérêt semblable, d'évitement pour le douloureux prévisible, de saturation pour le trop connu, de réaction de type "circulaire" pour la nouveauté intéressante, d'oscillation entre stratégies probables, d'esquisse d'activité en cas d'interférence, de régression apparente suite à une insatisfaction (exemple du "rejet" du doigt à sucer en cas de grande faim : l'échec de la tétée est remplacée par une réaction à la douleur de type remuement de la tête)...
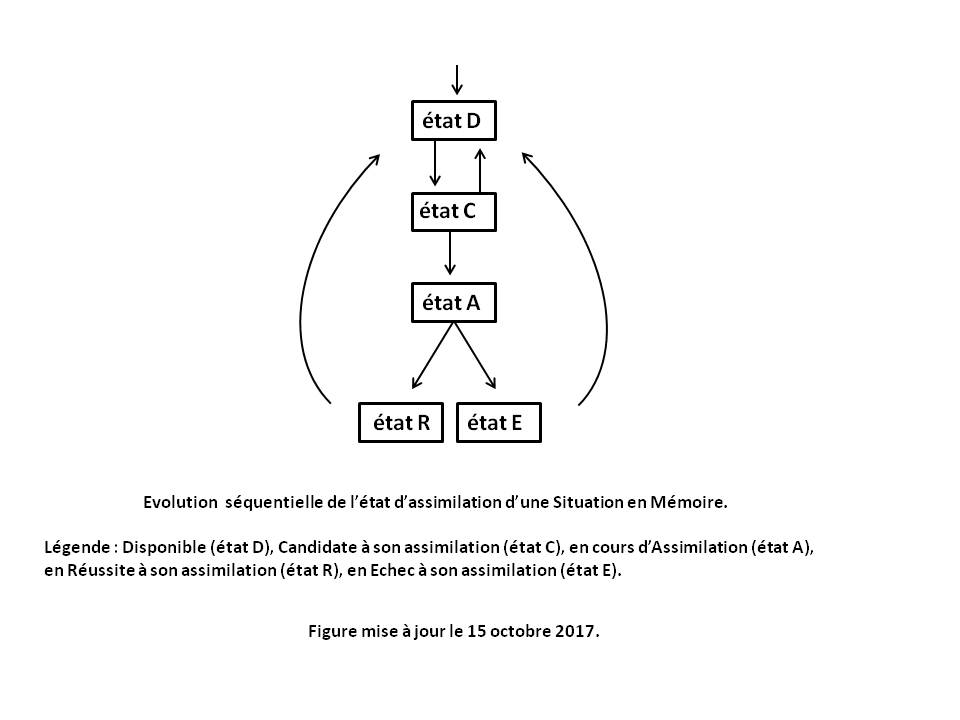
La Figure ci-dessus montre l'évolution séquentielle de l'Etat d'assimilation d'une Situation en Mémoire.
Cette sous-fonction met en compétition (concurrence), à chaque instant, toutes les Situations en Mémoire candidates à l'assimilation de la Situation réelle (externe) et élit celle de plus grand intérêt.
L'instant de cette compétition correspond à un laps de temps très court (environ 0.1 s).
Les étapes de cette compétition sont les suivantes (voir Figure D3) :
Passage de l'Etat Disponible (D) à l'Etat Candidat (C) lorsque :
- Disponibilité : les Situations en Mémoire sont disponibles pour assimilation immédiate (Etat d'assimilation D).
- Coincidence : les premiers termes (s1) de ces Situations produisent chacun une réponse non nulle (r2) pendant ce laps de temps.
Passage de l'Etat Candidat (C) à l'Etat Assimilation en cours (A) lorsque :
- Candidature : les Situations sont candidates à leur assimilation (Etat C).
- Plus grand intérêt (ou plus grande saillance) : parmi ces Situations, la Situation de "plus grand Intérêt" est celle qui cumule le plus les propriétés suivantes :
1- Nouveauté : intérêt prioritaire pour les Situations nouvellement créées (Etat de Stabilisation = N). Cette propriété est le moteur de la Fonction Stabilisation.
2- Insatisfaction : intérêt prioritaire pour les Situations passant par les Buts perdus (cycles rompus). Cette propriété est le moteur de la Fonction Tâtonnement.
3- Ressemblance : intérêt pour les Situations ayant une réponse élevée de leur Indice perceptif (premier terme (s1) à forte réponse (r2)). Cette propriété rend compte avantageusement des conduites de "regard alternatif" entre objets d'intérêt semblable.
4- Habitude : intérêt pour les Situations à fort taux de réussite à leur assimilation pure ou non pure (voir Niveau d'habitude (Uh)). Cette propriété rend compte avantageusement des conduites de "réaction circulaire", exercice fonctionnel aboutissant au maintien ou à la redécouverte d'un résultat nouveau intéressant [PIA NI 55].
5- Incidence mentale : intérêt pour les Situations sensori-motrices en lien filial avec des Situations mentales à fort taux de réussite à leur assimilation pure ou non pure (voir Niveau d'incidence mentale (Ui)). Cette propriété rend compte avantageusement des conduites réussies d'anticipation mentale.
6- Saturation : désintérêt pour les Situations à fort taux de réussite à leur assimilation pure relativement aux réussites de ces Situations à leur assimilation pure ou non pure (voir Niveau de saturation (Us)). Cette propriété rend compte avantageusement des conduites de saturation pour le trop connu.
7- Danger : désintérêt pour les Situations à fort danger prévisible (voir Niveau de danger (Ud)). Cette propriété rend compte avantageusement des conduites d'évitement pour le douloureux prévisible.
Passage de l'Etat Candidat (C) à l'Etat Disponible à nouveau (D) lorsque :
- Candidature : les Situations sont candidates à leur assimilation (Etat C).
- Moins grand intérêt : parmi ces Situations, toutes sauf une n'ont pas été élues Situation de plus grand intérêt.
- Lancement des fonctions induites : les Fonctions et Sous-fonctions conditionnées par l'Etat (C) de la Situation ont été toutes déclenchées.
Remarque 1 : A un instant donné, entre deux Situations candidates, une Situation Habituelle mais Dangereuse peut ainsi avoir le même intérêt global qu'une Situation sans Danger mais Inhabituelle (stratégie de prise de risque).
Remarque 2 : L'intérêt à retrouver la nouveauté découverte [PIA NI 76] peut s'apparenter à un "tâtonnement dirigé" dont le But perdu serait le But nouvellement créé (voir Fonction Tâtonnement).
La Situation élue serait alors, parmi l'ensemble des Situations Candidates et Insatisfaites, celle par exemple dont la quantité globale { (0.001 + r2) (0.001 + Ui) (0.001 + Uh) (1.001 - Us) (1.001 - Ud) } est la plus grande. A noter que le produit (0.001 + Uh)(1.001 - Us) représente une combinaison optimale d'intérêts opposés de types attirance (habitude) et évitement (saturation). Ce produit correspond également au taux Nr2/Na, où Nr2 et Na désignent respectivement, pour toute Situation élue au titre de Situation de plus grand Intérêt, le nombre de réussites à son assimilation non pure (état R2) et à l'élection de la Situation (état A) depuis sa création.
Cette sous-fonction réalise le pilotage de l'assimilation de la Situation de plus grand intérêt.
Les étapes de ce pilotage sont les suivantes :
Passage de l'Etat Assimilation en cours (A) à l'Etat Réussite à son assimilation (R) lorsque :
- Parcours du cycle : la Situation est en cours d'Assimilation (Etat A).
- Fermeture du cycle : le dernier terme (sn) de la Situation en cours d'Assimilation a été perçu et a produit la décision d'action (a1) relative au premier terme (s1).
- Réussite à son assimilation pure : lorsqu'il y a assimilation exacte des objets au cycle, on sous-note (R1) l'Etat (R) pour lequel tous les termes (si) du cycle sont perçus avec une réponse (ri) supérieure au seuil de perception pure.
- Réussite à son assimilation non pure : dans le cas contraire où il y a assimilation approximative d'un ou plusieurs objets au cycle, on sous-note (R2) l'Etat (R) pour lequel au moins un terme (si) du cycle est perçu avec une réponse (ri) inférieure au seuil de perception pure.
Passage de l'Etat Assimilation en cours (A) à l'Etat Echec à son assimilation (E) lorsque :
- Parcours du cycle : la Situation est en cours d'Assimilation (Etat A).
- Rupture du cycle : un terme quelconque (si) du cycle n'est pas perçu dans le délai maximum de perception du terme (si). Voir Fonction Perception.
Passage de l'Etat Réussite (R) ou Echec (E) à l'Etat Disponible à nouveau (D) lorsque :
- Fermeture ou rupture du cycle : la Situation est en Réussite (Etat R) ou en Echec (Etat E) à son assimilation.
- Lancement des fonctions induites : les Fonctions et Sous-fonctions conditionnées par les Etats (R) ou (E) de la Situation ont été toutes déclenchées (notamment les Fonctions Ajustement perceptif, Coordination réciproque, Tâtonnement dirigé, Représentation).
Cette sous-fonction traite tous les cas d'interférence motrice pouvant se produire entre Situations en cours d'Assimilation. Afin de reporter le plus tard possible la mise en échec des assimilations induite par ces interférences motrices, cette sous-fonction est déportée avantageusement dans le Sous-système Motricité fine (voir Fonction Filtrage).
Cette sous-fonction réalise l'actualisation du Niveau d'habitude (Uh) de chaque Situation en Mémoire dans les cas suivants :
- Situation passant à l'Etat N : Uh initialisé à une valeur prédéfinie
- Situation passant à l'Etat R : Uh augmenté
- Situation passant à l'Etat E : Uh diminué
Pour une Situation donnée, cette fonction peut s'écrire par exemple : Uh = Nr / Na
où Nr et Na désignent respectivement le nombre de réussites à l'assimilation (état R) et à l'élection (état A) de la Situation depuis sa création,
et avec les règles d'actualisation suivantes :
- Création d'une nouvelle Situation : Na = 2 et Nr = 1 (exemple où Uh init = 1/2) ;
- Passage à l'Etat A : Na = Na + 1 ;
- Passage à l'Etat R : Nr = Nr + 1 ;
D'où Uh = 1/2, 2/3, 3/4... pour une succession ininterrompue de réussites, Uh = 1/2, 1/3, 1/4... pour une succession ininterrompue d'échecs, toutes les valeurs entre 0 et 1 étant possibles selon l'alternance des réussites et des échecs.
Remarque : cette sous-fonction s'apparente à la loi de Hebb, appliquée à l'ensemble des termes de la Situation plutôt qu'à deux termes successifs quelconques.
Cette sous-fonction réalise l'actualisation du Niveau d'incidence mentale (Ui) de chaque Situation sensori-motrice en Mémoire dans les cas suivants :
- Situation sensori-motrice passant à l'Etat N : Ui initialisé à une valeur prédéfinie
- Toute Situation mentale, en lien filial avec cette Situation sensori-motrice, passant à l'Etat R : Ui augmenté
- Toute Situation mentale, en lien filial avec cette Situation sensori-motrice, passant à l'Etat E : Ui diminué
Pour une Situation sensori-motrice donnée, cette fonction peut s'écrire par exemple : Uh = Nr / Na
où Nr et Na désignent respectivementle nombre de réussites à l'assimilation (état R) et à l'élection (état A) de toutes les Situations mentales depuis la création de la Situation sensori-motrice,
et avec les mêmes règles d'actualisation que pour le Niveau d'habitude (Uh).
Remarque : cette sous-fonction s'apparente à la loi de Hebb, appliquée à l'ensemble des Situations sensori-motrices en lien avec la Situation mentale.
Cette sous-fonction réalise l'actualisation du Niveau de saturation (Us) de chaque Situation en Mémoire dans les cas suivants :
- Situation passant à l'Etat N : Us initialisé à une valeur prédéfinie
- Situation passant à l'Etat R1 (assimilation pure) : Us augmenté
- Situation passant à l'Etat R2 (assimilation non pure) : Us diminué
Pour une Situation donnée, cette fonction peut s'écrire par exemple : Us = Nr1 / Nr
où Nr1 et Nr désignent respectivement le nombre de réussites à l'assimilation pure (état R1) et à l'assimilation pure ou non pure (état R) de la Situation depuis sa création,
et avec les règles d'actualisation suivantes :
- Création d'une nouvelle Situation : Nr = 2 et Nr1 = 1 (exemple où Us init = 1/2) ;
- Passage à l'Etat R1 : Nr1 = Nr1 + 1 ;
- Passage à l'Etat R : Nr = Nr + 1 ;
D'où Us = 1/2, 2/3, 3/4... pour une succession ininterrompue de réussites pures, Us = 1/2, 1/3, 1/4... pour une succession ininterrompue de réussites non pures, toutes les valeurs entre 0 et 1 étant possibles selon l'alternance des réussites pures et non pures.
Cette sous-fonction réalise le choix du futur terme à assimiler pour chaque Situation en Mémoire dans les cas suivants (voir Figure D3) :
- Situation passant à l'Etat A : terme suivant (parcours du cycle)
- Situation déjà à l'Etat A avec terme produisant une réponse (ri) : terme suivant (parcours du cycle)
- Situation passant à l'Etat R1 : premier terme (fermeture du cycle sans accommodation)
Cette fonction, incluse dans la fonction Perception, produit des événements moteur (ai) à une date donnée (di) en fonction des réponses (ri) produites par les Situations en Mémoire et de la proprioception attendue (pi). Voir Fonction Perception.
Remarque 1 : Les mouvements du SMA associé au SNH peuvent être propres (i.e. liés à la décision d'action) aussi bien qu'imposés par le Milieu (i.e. indépendants de la décision d'action). Leur reproduction par le SNH nécessite donc que les événements moteur (a) soient définis et mémorisés dans un référentiel perceptif. Ils constitueront les consignes proprioceptives (p) ou extéroceptives (e) en entrée du Sous-système Motricité fine (voir Figure D2).
Remarque 2 : Dans le cas simplifié où chaque fibre musculaire est supposée être commandée (c) par un seul neurone moteur et sa déformation mesurée par au moins un neurone sensoriel de type proprioceptif (p) ou extéroceptif (e), alors le stockage de l'événement moteur (a) en Mémoire devient inutile car déjà disponible sous forme de consigne proprioceptive ou extéroceptive.
Cette fonction comporte les sous-fonctions suivantes :
FG1 : Généralisation en cours d'Assimilation (Etat A) : cette sous-fonction étend la Fonction Perception aux Situations en Mémoire voisines de la Situation réelle, certains événements perceptifs (ri, pi et/ou ei) pouvant avoir le pouvoir d'évoquer seuls les réponses (r i+1).
Cette sous-fonction ne s'ajoute pas aux autres fonctions du sous-système Apprentissage & motricité. C'est une fonction implicite résultant de la Fonction Perception. Elle rend compte avantageusement des conduites de "conditionnement classique" ou de "transfert associatif" après la phase d'acquisition (voir Grandes étapes du développement).
FG2 : Généralisation sur réussite de l'assimilation non pure (Etat R2) : cette sous-fonction déclenche simplement la fonction Ajustement perceptif.
FG3 : Généralisation sur échec de l'assimilation (Etat E) : cette sous-fonction déclenche simplement la fonction Tâtonnement dirigé.
Cette fonction identifie en Mémoire toutes les Situations en réussite à leur assimilation non pure et produit des Variantes incorporant les particularités, nuances et détails des objets perçus.
En première approximation, cette fonction est basée sur les principes simples suivants :
1- Support : L'Assimilation fournit seule le support sensoriel et moteur nécessaire à l'activité d'ajustement perceptif.
2- Déclenchement : Tout Ajustement perceptif est déclenché dès qu'une Situation se trouve en réussite à son assimilation non pure (Etat R2).
3- Production : La Variante produite est une nouvelle Situation identique à la Situation déclencheuse, mais réactualisée par la nouveauté perceptive en remplaçant les événements attendus (pi), (ei) et (di) de chaque terme (si) par les événements réels.
Remarque : La condition n°2, associée au principe de tolérance de la Fonction Perception, limite la fonction Ajustement perceptif à de petits ajustements permettant d'annuler les écarts de valeur ou de synchronie entre événements attendus et événements réels. Tout autre événement non attendu n'est pas pris en compte par cette fonction.
Cette fonction explore la Mémoire selon une stratégie d'essais et d'erreurs visant à trouver une Solution qui referme le cycle de toute Situation en échec à son assimilation (voir Figure D3). La fonction est dirigée à chaque instant par le verrouillage de la recherche sur le But perdu de la Situation en échec.
En première approximation, cette fonction est basée sur les principes simples suivants :
1- Support : L'Assimilation fournit seule le support sensoriel et moteur nécessaire à l'activité de tâtonnement.
2- Déclenchement : Tout tâtonnement est déclenché dès qu'une Situation en Mémoire possède les propriétés suivantes :
- La Situation tombe en Echec à son assimilation (Etat E).
- Sous l'hypothèse qu'une Situation Nouvellement créée (Etat N) n'est pas éligible au déclenchement d'un tâtonnement, alors la Situation déclencheuse doit en outre être stabilisée (Etat S) pour pouvoir déclencher un tâtonnement (voir Fonction Stabilisation).
3- Héritage : En conséquence des principes 1 et 2, la fonction Tâtonnement peut hériter avantageusement des propriétés de toutes les fonctions d'Assimilation (Perception, Orchestration, Décision) et les utiliser pour sa propre activité.
4- Récursivité : Tout tâtonnement peut induire des tâtonnements d'ordre inférieur lorsque de nouvelles Situations Insatisfaites sont découvertes au cours de ce tâtonnement.
5- Arrêt : Tout tâtonnement en cours s'arrête (ainsi que tous les tâtonnements induits d'ordre inférieur) lorsqu'il y a perception du But perdu de la Situation déclencheuse, ou bien lorsque le But perdu n'est pas perçu dans un délai maximum de tâtonnement (lié au temps de cycle de la Situation déclencheuse). Dans le premier cas, le But perdu disparaît du paysage mnésique. Dans le second cas, le But perdu garde tout son "intérêt" pour toute autre assimilation à venir.
6- Elagage : La Mémoire ne retient pas la cause de la perturbation externe mais la nouveauté correctrice découverte par expérimentation active [MOC Intelligence 228]. La Solution produite par Tâtonnement ignore donc le terme en Echec de la Situation déclencheuse (ainsi que le premier terme de la Situation correctrice). Voir Exemple de tâtonnement dirigé.
7- Production : La Solution produite est une nouvelle Situation composée d'un enchaînement temporel de termes appartenant à des Situations plus ou moins totalement assimilées dont la dernière passe par le But perdu de la Situation déclencheuse (voir Exemple de tâtonnement dirigé).
La Solution produite est de plus réactualisée par la nouveauté perceptive en remplaçant les événements attendus (pi), (ei) et (di) de chaque terme (si) par les événements réels.
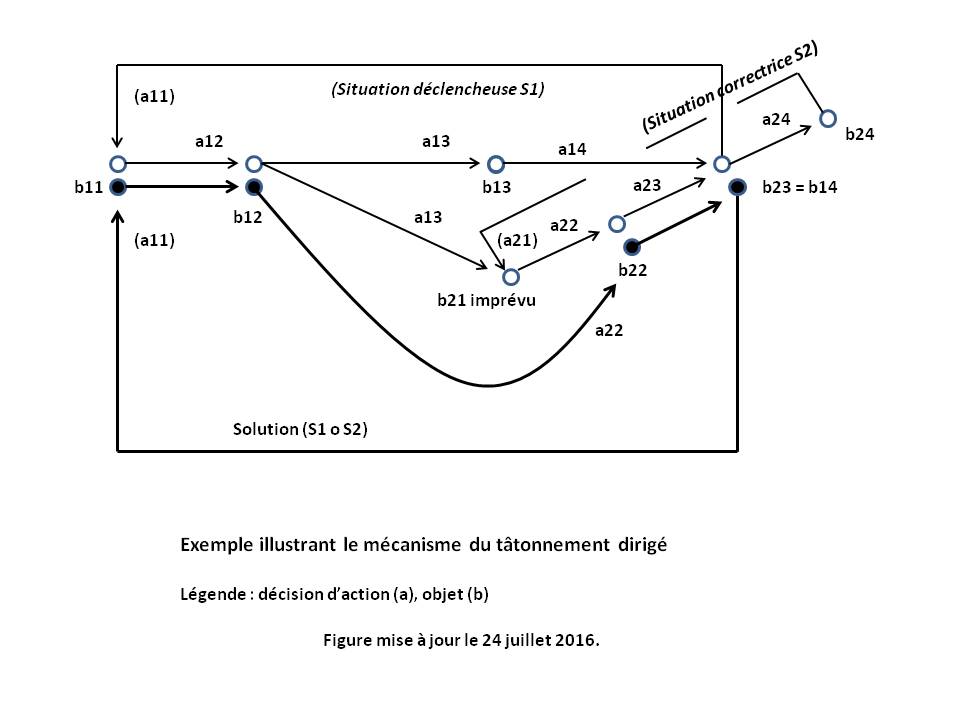
La Figure ci-dessus montre un exemple illustrant le mécanisme du tâtonnement dirigé, inspiré de Jean Piaget [PIA EC 10, 16, 38].
Si le sigle 'o' désigne l'opération de compilation entre deux Situations quelconques (S1 et S2), alors les étapes sont les suivantes :
- Situations en mémoire :
S1 = { (a11) x b11 --> a12 x b12 --> a13 x b13 --> a14 x b14 --> a11 }
S2 = { (a21) x b21 --> a22 x b22 --> a23 x b23 --> a24 x b24 --> a21 } dont le terme perceptif b23 est identique au But b14 de la Situation S1
- Sur perception de b11, il y a assimilation de S1 = b11 --> a12 x b12 --> a13..., suivie par exemple de l'apparition imprévue du terme b21 supposé très différent de b13.
- Déclenchement du tâtonnement, dirigé à la fois par le terme perturbateur b21 et par les termes cibles b13 et b14.
- Sur perception de b21, il y a assimilation de S2 = b21 --> a22 x b22 --> ... avec fermeture du cycle S1 sur le terme b23 = b14
- Solution trouvée avant élagage : S1 o S2 avant élagage = { (a11) x b11 --> a12 x b12 --> a13 x b21 --> a22 x b22 --> a23 x [b23 = b14] --> a11 }
- Solution trouvée après élagage : S1 o S2 = { (a11) x b11 --> a12 x b12 --> a22 x b22 --> a23 x [b23 = b14] --> a11 }
- Cette Solution a pour particularité de substituer le terme en Echec (a13 x b13) par le nouveau terme (a22 x b22), tout en conservant la même date d13.
- Modification en Mémoire : en sus de S1 et S2, création d'une nouvelle Situation S1 o S2.
Remarque 1 : Le principe d'élagage (par substitution d'un terme par un autre) nécessite que toute décision d'action (ai) composant un terme (si) soit indépendante de la décision d'action (a i-1) composant le terme précédant (s i-1). Cela nécessite que toute décision d'action (ai) soit quantifiée par rapport à l'origine fixe du repère et non en relatif par rapport à une valeur précédente. En général, le référentiel perceptif des décisions d'action est de nature proprioceptive pour les besoins de la Fonction Asservissement, avec l'identité ai = pi attendu.
Remarque 2 : La Solution trouvée avant élagage est conforme aux premières présentations de Jean Piaget de ce mécanisme d'accommodation [PIA NI 12][PIA BC 169].
Au sens Piagétien, le tâtonnement dirigé du stade 1 du nourrisson (Exercice des réflexes avec mémorisation de la série des actes se conditionnant les uns les autres) correspond à cette fonction (voir Grandes étapes du développement).
Par simplification, nous considérons que le rebouclage se fait uniquement sur le But perdu de la Situation déclencheuse (terme an x bn) et non pas sur l'un quelconque des termes situé à partir du terme en Echec et avant le terme But.
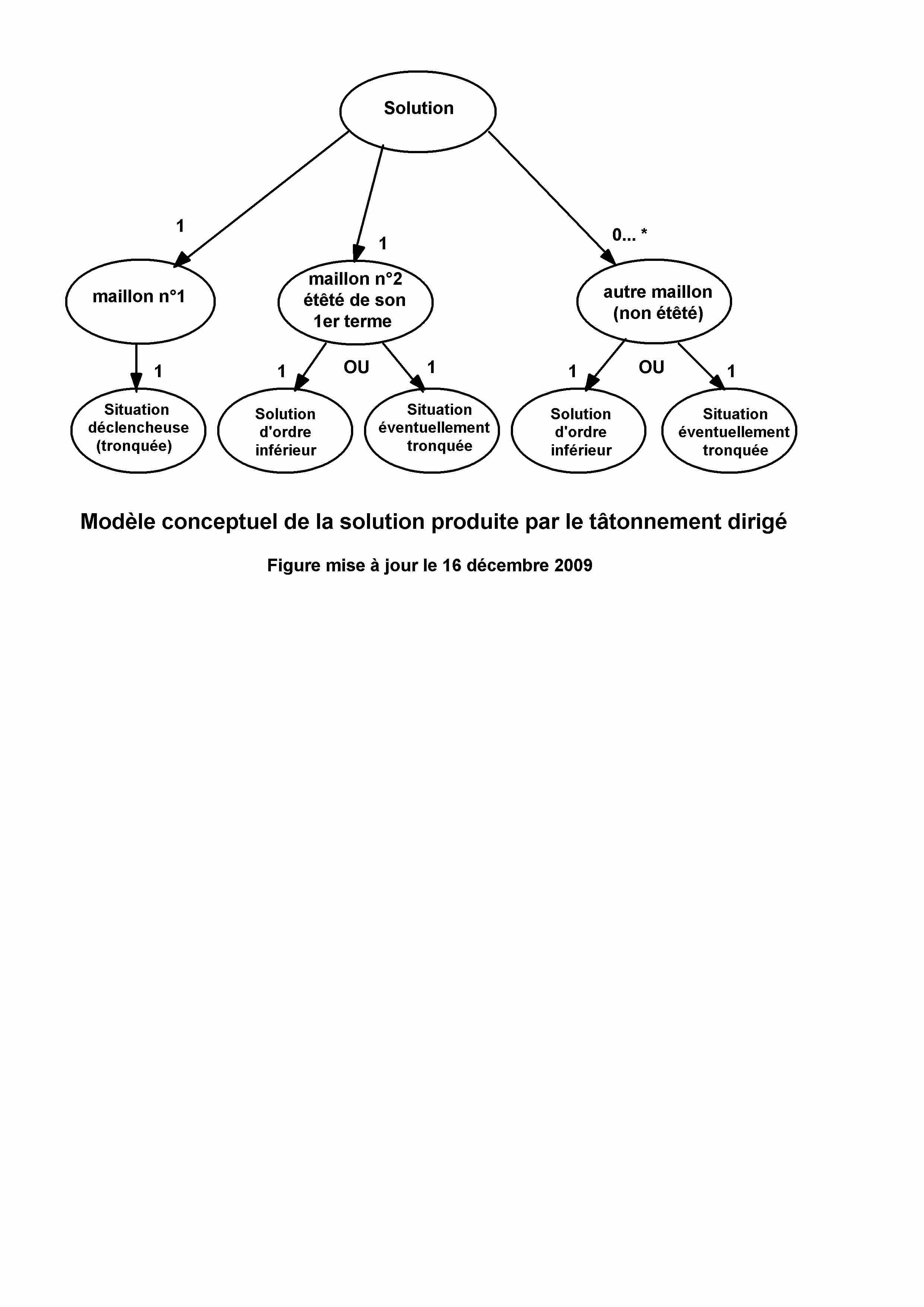
Dans ce cas, la Figure ci-dessus donne le modèle conceptuel de la Solution produite par le tâtonnement.
Si le sigle "+" désigne l'enchaînement de deux Situations quelconques, alors la Solution L(Sj) associée à la Situation déclencheuse Sj peut s'écrire sous le forme récursive suivante :
L(Sj) = Sj + enchaînement_sur_k_de_2_à_j'[ Sjk ou L(Sjk) ]
où j' (avec j' > 1) est le nombre de maillons de la chaîne composant la Solution L(Sj) à son premier niveau de décomposition,
où Sj représente la Situation S d'indice j, premier maillon de la chaîne, tronqué à partir du terme en Echec,
où [ Sjk ou L(Sjk) ] représente un ensemble de maillons supplémentaires dont le premier (pour k = 2) est étêté de son premier terme, et dont le dernier (pour k = j') passe par le But perdu de la Situation Sj,
où Sjk représente la Situation S d'indice jk, éventuellement tronquée à partir d'un terme quelconque,
où L(Sjk) représente la Solution d'ordre inférieur à celui de la Solution L(Sj).
Cette fonction explore la Mémoire selon une stratégie de détection de coincidences inter-Situations visant à produire des Compilations fusionnant les termes respectifs de chaque Situation.
Exemple n°1 de la Situation "Voir et sentir sa main qui bouge" : coincidence entre le mouvement de la main dans l'espace rétinien et le mouvement de l'ensemble bras-main dans l'espace proprioceptif.
Exemple n°2 de la Situation "Sucer le sein pour s'alimenter" : coincidence entre la posture de tétée et la succion du sein.
Cette fonction produit avantageusement des Compilations de type enchaînement (succession), emboîtement (inclusion) et entrecroisement (interférence) entre deux Situations.
En première approximation, cette fonction est basée sur les principes simples suivants :
1- Support : L'Assimilation fournit seule le support sensoriel et moteur nécessaire à l'activité de coordination réciproque.
2- Déclenchement : Toute coordination réciproque est déclenchée dès que deux Situations en Mémoire possède les propriétés suivantes :
- Coincidence : Deux termes quelconques, pris respectivement dans chaque Situation, produisent chacun une réponse non nulle dans un même laps de temps très court (environ 0.1 s).
- Assimilation collective : Dans le cas de réponse issue d'un premier terme, la Situation doit être alors élue au titre de Situation de plus grand intérêt (passage à l'Etat A) puis tomber en Réussite à son assimilation pure (Etat R1). Dans le cas contraire (2ème, 3ème... dernier terme), la Situation doit être en cours d'Assimilation (Etat A) puis tomber en Réussite à son assimilation pure (Etat R1).
- Sous l'hypothèse qu'une Situation Nouvellement créée (Etat N) n'est pas éligible au déclenchement d'une coordination réciproque, alors les Situations déclencheuses doivent en outre être toutes stabilisées (Etat S) pour pouvoir déclencher une coordination réciproque (voir Fonction Stabilisation).
3- Héritage : En conséquence des principes 1 et 2, la fonction Coordination réciproque peut hériter avantageusement des propriétés de toutes les fonctions d'Assimilation (Perception, Orchestration, Décision) et les utiliser pour sa propre activité.
4- Production : la Compilation produite est une nouvelle Situation obtenue par "fusion" des Situations déclencheuses. La fusion consiste essentiellement à réassembler leurs termes respectifs selon un axe chronologique. Voir Exemple de coordination réciproque.
La Compilation produite est de plus réactualisée par la nouveauté perceptive en remplaçant les événements attendus (pi), (ei) et (di) de chaque terme (si) par les événements réels.
Au sens Piagétien, les coordinations du stade 2 du nourrisson (Premières adaptations acquises) correspondent à cette fonction (voir Grandes étapes du développement). Dans le cas de la coordination entre préhension et vision, la progression de l'apprentissage du nourrisson pourrait être le suivant :
- Coordination primitive (type 2) : Regarder la main qui bouge. Coordination A entre la Situation "Bouger la main librement" et la Situation "Regarder la main vue seule".
- Accommodation : Maintenir/ramener la main dans le champ visuel. Accommodation suite à la main perdue. Utilisation des mouvements qui viennent d'être exécutés (Situation "Regarder la main qui bouge" issue de la coordination A).
- Coordination ébauche (type 3) : Regarder la main qui bouge près d'un objet. Coordination B entre la Situation "Regarder la main et l'objet vus ensemble" et la Situation "Regarder la main qui bouge" issue de la coordination A.
- Coordination essentielle (type 4) : Regarder prendre : regarder la main qui saisit un objet. Coordination C entre la Situation "Regarder la main et l'objet vus ensemble" et la Situation "Saisir un objet touché".
- Coordination complète (type 5) : Regarder et prendre : regarder un objet vu seul et le saisir. Coordination D entre la phase d'approche "Amener la main près de l'objet vu", obtenue par exécution de la coordination B (sur discrimination de l'objet seul), et la phase de saisie "Regarder la main qui saisit l'objet" obtenue par exécution de la coordination C.
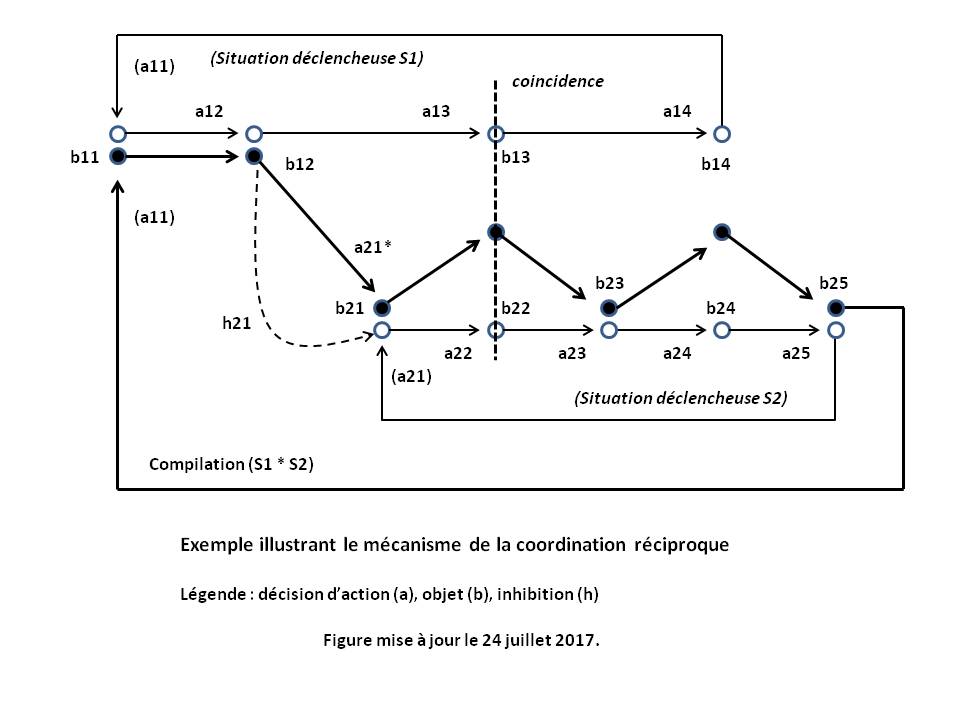
La Figure ci-dessus montre un exemple illustrant le mécanisme de la coordination reciproque.
Si le sigle '*' désigne l'opération de fusion entre deux termes quelconques (s1i et s2i) de deux Situations quelconques (S1 et S2), alors les étapes sont les suivantes :
- Situations en mémoire :
S1 = { (a11) x b11 --> a12 x b12 --> a13 x b13 --> a14 x b14 --> a11 }
S2 = { (a21) x b21 --> a22 x b22 --> a23 x b23 --> a24 x b24 --> a25 x b25 --> a21 }
- Assimilations pures de S1 et S2 avec perception simultanée ou quasi-simultanée des termes b13 et b22.
- Déclenchement de la coordination réciproque entre S1 et S2 qui consiste à réassembler l'ensemble de leurs termes (s1i) et (s2i) selon un axe chronologique, avec les particularités suivantes de compilation :
- compilation du premier terme de S2 : ajout du terme moteur a21* = a21 visant à provoquer la perception attendue b21 (synchronisation forcée avec date d21* = d13 - d22)
- compilation de la première coincidence de termes entre S1 et S2 : fusion des termes s13 et s22 (avec synchronisation naturelle [a13 * a22] des termes moteurs)
- compilation des éventuelles autres coincidences de termes entre S1 et S2 : fusion des termes s14 et s24 (avec synchronisation naturelle [a14 * a24] des termes moteurs)
- lien avec Situation S2 déclencheuse : inhibition h21 du terme b21 à l'instant précis de la production de a21*, visant à éliminer toute assimilation ultérieure de S2 en parallèle des assimilations de la Compilation (S1 * S2)
- lien avec Situation S1 déclencheuse : inhibition inutile du terme b11, la Fonction Orchestration sélectionnant une seule Situation entre S1 et la Compilation (S1 * S2)
- Compilation produite après réassemblage : S1 * S2 = { (a11) x b11 --> a12 x b12 --> a21 x b21 --> [a13 * a22] x [b13 * b22] --> a23 x b23 --> [a14 * a24] x [b14 * b24] --> a25 x b25 --> a11 }
- Modification en Mémoire : en sus de S1 et S2, création d'une nouvelle Situation (S1 * S2) en lien avec la Situation S2 déclencheuse.
Remarque : Le principe de fusion nécessite que toute décision d'action (ai) composant un terme (si) soit indépendante de la décision d'action (a i-1) composant le terme précédant (s i-1). Cela nécessite que toute décision d'action (ai) soit quantifiée par rapport à l'origine fixe du repère et non en relatif par rapport à une valeur précédente. En général, le référentiel perceptif des décisions d'action est de nature proprioceptive pour les besoins de la Fonction Asservissement, avec l'identité ai = pi attendu.
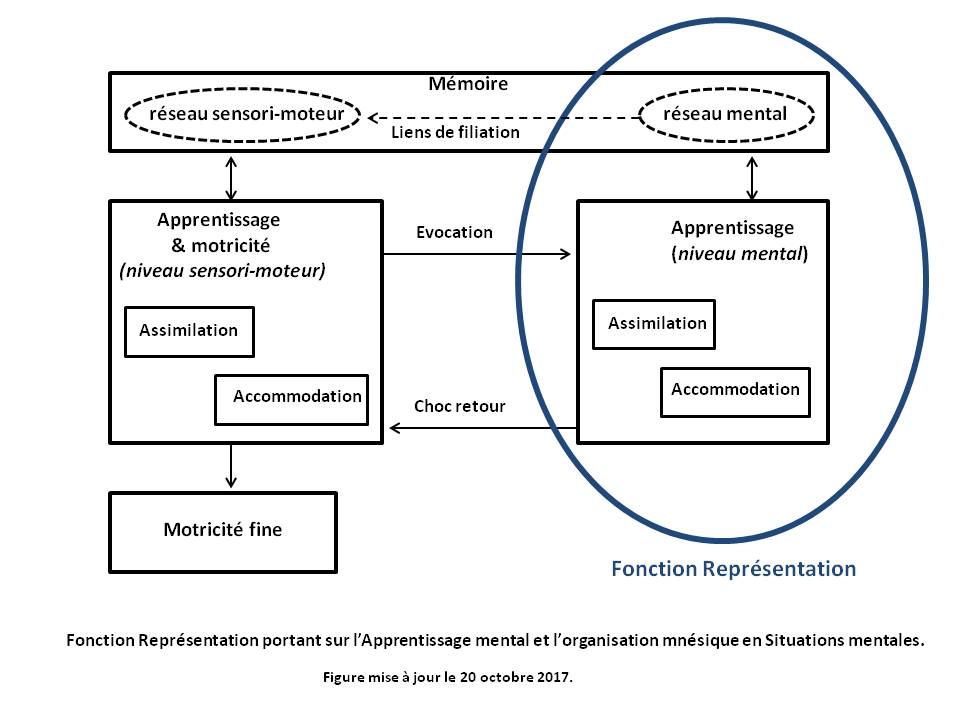
La Figure ci-dessus montre la fonction Représentation qui porte sur le Sous-système d'Apprentissage mental et le réseau mnésique des Situations mentales.
Cette fonction double le processus d'assimilation-accommodation du niveau sensori-moteur par un processus similaire au niveau mental afin que le SNH puisse s'adapter de façon encore plus précise aux diversités du monde réel.
Pour cela, cette fonction possède avantageusement les propriétés suivantes :
1) Situation mentale : Un nouveau type de Situation enrichit la Mémoire : la Situation mentale (en complément de la Situation sensori-motrice) qui est indépendante de l'activité motrice du SNH (Situation sans décision d'action entre ses termes successifs). En cours d'évolution du SNH (période de l'enfance entre 7 et 12 ans), la Situation mentale devient en outre totalement indépendante des champs perceptif et temporel (assimilation purement mentale) et réversible (assimilation des termes en ordre inverse, de type explication).
2) Réseau mnésique mental : Les Situations mentales sont organisées en Mémoire en un système de classes (concepts) et de relations (opérations), avec des propriétés d'emboîtements, de contiguïté et de prise de conscience permettant d'évoquer les objets absents. Ce système intégre les notions Piagétiennes d'objet, d'espace, de causalité et de temps (système non détaillé ici).
3) Assimilation et accommodation mentales : Les processus d'assimilation et d'accommodation de niveau mental sont identiques aux processus d'assimilation et d'accommodation de niveau sensori-moteur, sans la fonction Décision. Le développement mental répète alors en décalé l'évolution qui semblait achevée sur le terrain sensori-moteur (principe Piagétien de "décalage vertical").
4) Influence mutuelle des niveaux sensori-moteur et mental : Les sous-systèmes d'apprentissage sensori-moteur et d'apprentissage mental sont autonomes et agissent chacun sur son propre réseau mnésique (respectivement sensori-moteur et mental). Ils s'influencent mutuellement (voir Figure ci-dessus) par le biais, d'une part d'événements de type "Evocation" déclenchant l'assimilation des Situations mentales (voir Situations-réflexes), d'autre part d'événements de type "Choc retour" renforçant l'intérêt des Situations sensori-motrices (voir Fonction Orchestration).
5) Genèse des Situations mentales : Les Situations mentales sont initialement produites par assimilation-accommodation de Situations-réflexes mentales, en lien avec les Situations sensori-motrices qui les ont évoquées (voir Situations-réflexes), puis étendues par assimilation-accommodation de toute Situation mentale.
Observation : Sur le plan de la conduite, le sujet se livre à la conquête d'un milieu toujours plus étendu, grâce à ses schèmes dont le rayon d'action est de plus en plus grand. La perception et les mouvements élémentaires (préhension, etc.) donnent d'abord prise sur les objets proches et dans leur état momentané (période sensori-motrice du nourrisson, stades 1 et 2 ; 0 à 4 mois), puis la mémoire et l'intelligence pratiques permettent à la fois de reconstituer leur état immédiatement antérieur et d'anticiper leurs transformations prochaines (même période, stades 3 à 6 ; 4 mois à 2 ans).
L'intelligence intuitive renforce ensuite ces deux pouvoirs en libérant la pensée des distances spatio-temporelles courtes et des trajets réels, grâce à un développement mental qui répète en décalé l'évolution qui semblait achevée sur le terrain sensori-moteur (période de la petite enfance ; 2 à 7 ans). L'intelligence logique, sous sa forme d'opérations concrètes (période de l'enfance ; 7 à 12 ans) et enfin de déduction abstraite (période de l'adolescence ; 12 ans à l'âge adulte), termine cette évolution en rendant le sujet maître des évènements les plus lointains, dans l'espace et dans le temps [PIA SP 17][PIA PI 130].
Cette fonction assure le stockage organisé des Situations innées (initiales) et acquises (étendues).
L'organisation de chaque réseau mnésique (sensori-moteur et mental) est telle que toutes les Situations de même Type :
- sont des "totalités organisées", embarquant l'effet de chaque cause, donc aptes à naître et à mourir sans perturber les autres totalités,
- sont toutes placées à un même niveau de compétition lors de leur Assimilation (voir Fonction Orchestration).
Les Situations de Type mental sont en outre connectées par des liens de filiation aux Situations de Type sensori-moteur ayant contribué (directement ou indirectement) à leur création.
Cette fonction propage l'ensemble des événements perceptifs (p, e, r, h) à travers le réseau mnésique à des fins de reconnaissance des Situations existantes et/ou de modification du réseau.
Cette fonction modifie la structure du réseau mnésique en y intégrant de façon organisée :
- toute Variante produite par Ajustement perceptif
- toute Solution (ainsi que toute Solution d'ordre inférieur) trouvée par Tâtonnement dirigé
- toute Compilation produite par Coordination réciproque
La modification se fait sous forme de création d'une nouvelle Situation en extension des Situations origines. L'Etat de stabilisation est initialisé à la valeur Nouvellement créé (correspondant au stockage provisoire) et l'Etat d'assimilation à la valeur Disponible.
Remarque : Toutes les Situations-réflexes sont nativement dans l'Etat Disponible à l'origine du fonctionnement du SNH.
Cette fonction assure la stabilisation des Situations acquises selon les principes suivants :
- Toute Situation nouvellement créée (Etat N) est définitivement stockée en Mémoire dès que la première assimilation réussie de la Situation (Etat R) se produit dans un délai qui reste inférieur à un certain délai critique compté à partir de l'instant de création de la Situation. L'Etat de stabilisation passe alors à la valeur Stabilisé (correspondant au stockage définitif).
- Dans le cas contraire (délai atteint), la Situation est éliminée (sans perturber les éventuels Ajustement perceptif, Coordination réciproque, Tâtonnement dirigé et Représentation en cours conditionnés par cette Situation).
Remarque : Toutes les Situations-réflexes sont nativement dans l'Etat Stabilisé et le restent.
Cette fonction permet avantageusement de ne pas encombrer inutilement la Mémoire par des Situations nouvelles non confirmées rapidement par l'expérimentation active.
Cette fonction assure l'arbitrage en cas de conflit lorsque plusieurs décisions d'action (a) concernent le même neurone moteur.
En première approximation, un filtre général de type médiane peut faire l'affaire.
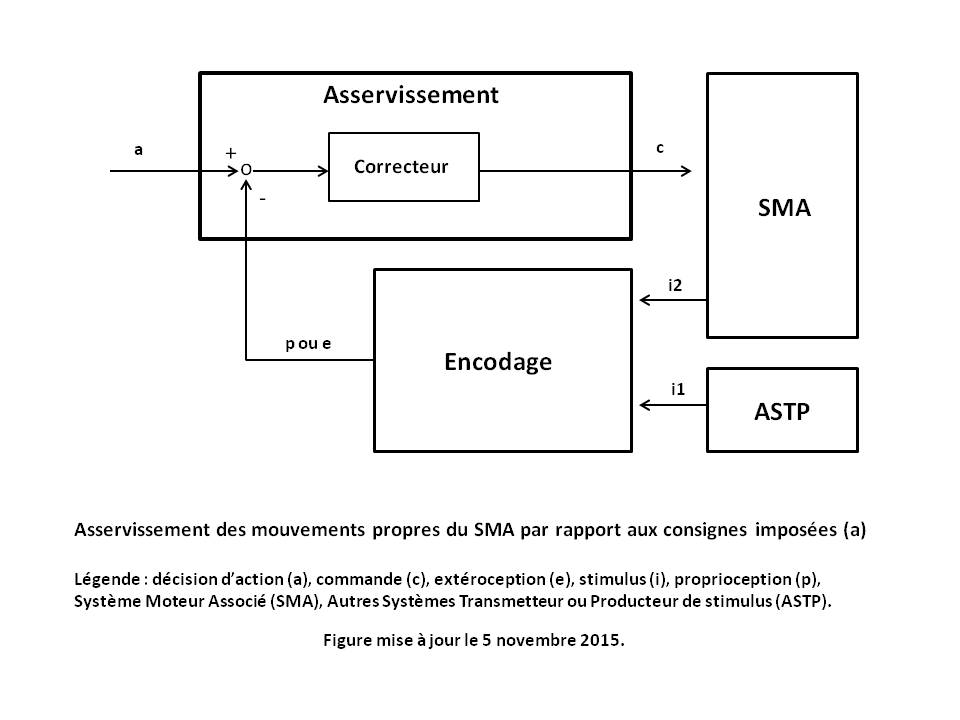
La Figure ci-dessus montre le principe d'asservissement des mouvements propres du SMA par rapport aux consignes imposées (a), la boucle de retour pouvant être de nature proprioceptive (cas général) ou extéroceptive (cas de l'asservissement des mouvements de l'oeil, par exemple).
Cette fonction assure l'exécution précise et sans à-coup des mouvements propres du SMA, même en présence de petites perturbations externes susceptibles de faire dévier les mouvements par rapport aux consignes imposées par le SNH.
En première approximation, un correcteur de type PID (Proportionnel, Intégral et Dérivé) placé derrière chaque consigne (a) peut faire l'affaire.
On notera avec attention que toutes les articulations du SMA assurent le déplacement des segments moteurs par le jeu, sur chaque articulation, de trois opérateurs rotationnels réversibles suivant trois axes orthogonaux. Exception faite du coude et du genou qui ne disposent que d'un seul axe de rotation, les articulations de la tête, des épaules et du poignet, de la hanche et de la cheville obéissent à cette règle par le jeu de paires de muscles antagonistes. De même pour le globe oculaire par le jeu de trois paires de muscles extrinsèques. De même également pour l'oreille interne par le jeu de trois paires de canaux semi-circulaires détecteurs des mouvements de la tête ([PAI 1971 Déterminants 264]).
Cette propriété morphologique remarquable permet de commander simplement les déplacements de chaque segment moteur du SMA.
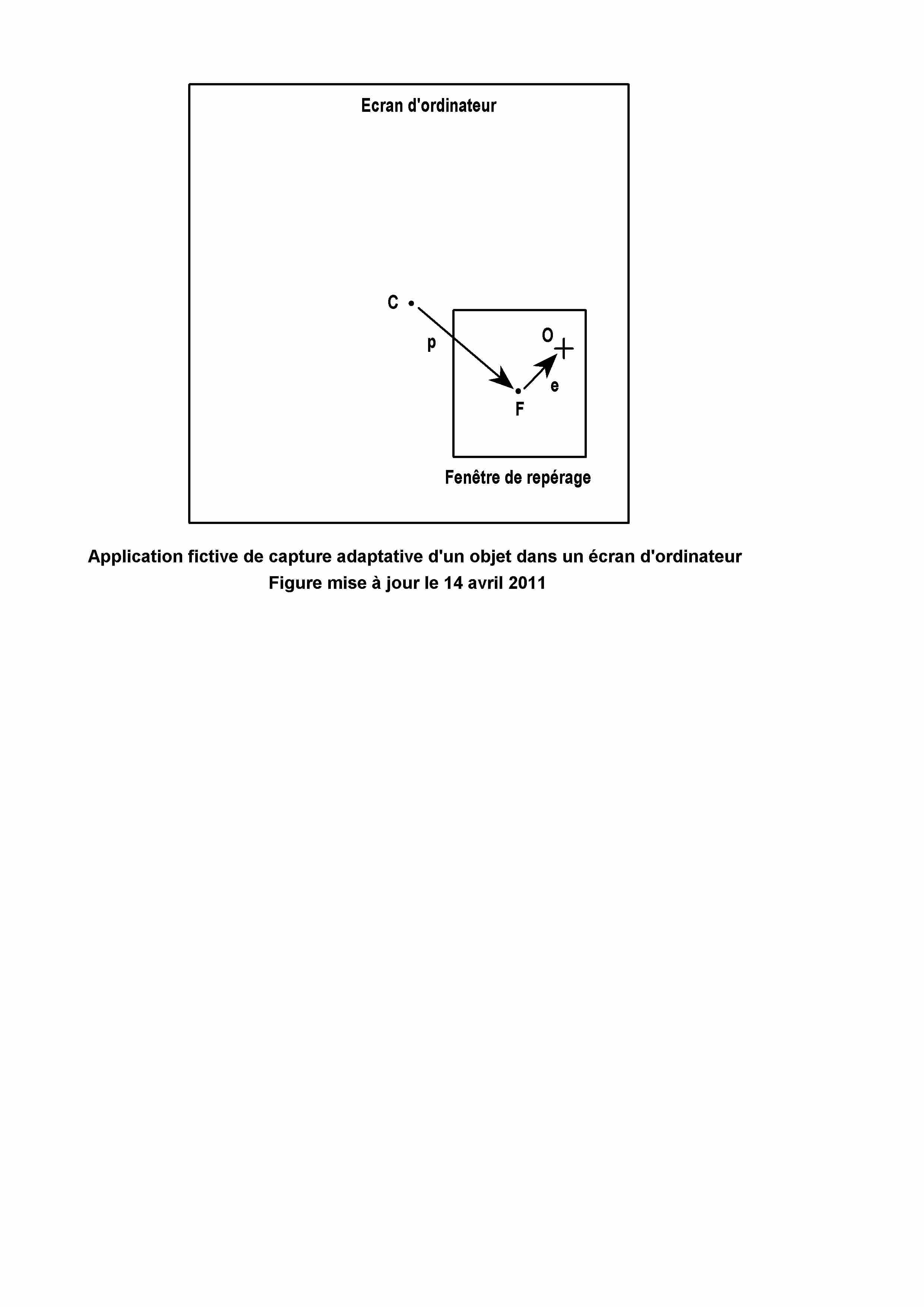
A titre d'exemple pédagogique, la Figure ci-dessus présente une application fictive dans le domaine de l'ordinateur personnel.
Ce SNH réalise la capture adaptative d'un objet dans un écran d'ordinateur.
L'écran d'ordinateur a pour centre le point (C).
La fenêtre de repérage a pour fovéa le point (F). Cette fenêtre est analogue à la rétine d'un oeil fictif.
Les objets à capturer se réduisent à une seule croix de centre O (pointeur écran reproduisant le déplacement de la souris).
Le Milieu se compose de l'écran, de la souris et des pilotes informatiques associés.
Le SMA se réduit à un organe de déplacement de la fenêtre dans l'écran (écran et pilote de la carte video).
Les ASTP se réduisent à un ensemble d'organes de déplacement des objets dans l'écran (souris, pilote de la souris, écran et pilote de la carte video).
Il n'y a aucune interaction entre le SMA et les ASTP.
En frontière avec le Milieu, on trouve :
- Les Unités motrices du SNH qui se réduisent à la commande des organes moteurs du SMA.
- Les Unités réceptrices du SNH qui se réduisent à un organe de détection extéroceptive des objets (fenêtre de repérage) et à un organe de localisation proprioceptive de cette fenêtre dans l'écran.
La Mémoire origine du SNH ne contient que des Situations-réflexes (S) de type "mouvement de capture" et en nombre illimité (donc toujours disponibles si besoin est).
Cycle : S = { (a1) x b1 --> a2 x b2 --> a1 }
b1 = croix + écart fovéal non nul (e1) de O par rapport à F
d2 = date (d2 = 0 pour capture visuelle)
a2 = action d'annulation de l'écart fovéal = p2 = p1 - Kpe (e2 - e1) avec e2 = 0
p = position de F par rapport à C en pixel-écran
e = position de la croix par rapport à F en pixel-fenêtre
e supposé nul dès que : Norme_de_[e1] < (1/100)
Kpe = taux de conversion entre proprioception (p) et extéroception (e)
b2 = même croix + écart fovéal nul (e2) de O par rapport à F
a1 = aucune action
On suppose en outre que le vrai taux Kpe (non connu) vaut : Kpe* = 9/10 Kpe, induisant à chaque essai de capture un écart fovéal e2 non nul valant e2 = (1 - Kpe/Kpe*)e1 = -(1/9)e1
Ce sous-système est pleinement opérationnel, sans restriction aucune :
- Les fonctions Réception puis Extraction produisent les extéroceptions élaborées (e) et proprioceptions élaborées (p).
Ce sous-système est pleinement opérationnel avec les restrictions suivantes :
- Les fonctions Equilibration, Perception, Ajustement perceptif, Décision, Généralisation et Coordination réciproque sont pleinement opérationnelles.
- La fonction Orchestration ne comporte pas les propriétés de Danger et de Saturation. La variabilité des conduites du SNH est liée uniquement aux propriétés de Ressemblance (premier terme (s1) à forte réponse (r2)) et d'Habitude (fort Niveau d'habitude (Uh)), avec une Situation élue qui serait alors, parmi les Situations Candidates passant en priorité par les Buts "perdus", celle par exemple dont la quantité globale { (1,1 - r2)(1 - Uh) } est la plus petite.
- La fonction Tâtonnement dirigé a un délai maximum de tâtonnement supposé infini qui ne met jamais en Echec le tâtonnement en cours.
Ce sous-système est pleinement opérationnel avec les restrictions suivantes :
- Les fonction Stockage, Diffusion et Modification sont pleinement opérationnelles.
- La fonction Stabilisation a un délai critique supposé infini qui n'élimine aucune Situation acquise.
Ce sous-système n'est pas utilisé dans la mesure où il n'y a pas de perturbations externes gênant le déplacement de la fenêtre. Le pilote de la carte video fonctionne en boucle ouverte, sans mesure ni correction de la position de la fenêtre après déplacement.
A l'origine, on suppose que la fenêtre se trouve au repos au centre C de l'écran (p1 = 0).
L'objet O apparaît alors subitement dans cette fenêtre, par exemple à mi-chemin du coin supérieur droit de la fenêtre (e1 = 1/2).
La Situation-réflexe S, de réponse r2 maximale (r2 = 1) et sans autre Situation candidate, est élue au titre de Situation de plus grand Intérêt. La fenêtre bouge vers O en le dépassant un peu (p2 = p1 + Kpe e1) et tombe en Echec à l'assimilation de S compte tenu de (e2 = -(1/9)e1 = -1/18 qui est non nul).
Par Tâtonnement dirigé, le SNH cherche une solution par utilisation d'une autre Situation disponible, en l'occurrence la Situation-réflexe S' analogue à S. La fenêtre rebouge vers O en le dépassant très peu en sens inverse (p'2 = p2 + Kpe e2) et tombe en Réussite à l'assimilation de S' compte tenu de (e'2 = -(1/9)e2 = 1/162 qui est considéré nul).
La Mémoire s'enrichit d'une Situation acquise S" sous la forme :
Cycle : S" = { (a"1) x b"1 --> a"2 x b"2 --> a"1 }
avec b"1 = (p"1 = 0 et e"1 = 1/2) et non plus b"1 = (p1 quelconque et e1 quelconque) comme pour les Situations-réflexes S ou S',
d"2 = d2
b"2 = (p"2 = p2 + Kpe e2 = p"1 + (8/9) Kpe e"1 et e"2 considéré nul)
Si l'objet O ne bouge pas, le SNH ne fait rien de plus.
Quand O bouge à nouveau, deux cas se présentent :
- Dans le cas où la fenêtre et l'objet ont tous deux une position assez proche du cas origine précédent, il y a perception concurrente de la Situation-réflexe S et de la Situation acquise S". La Situation S" (reconnue et nouvellement créée) est élue au titre Situation de plus grand Intérêt et la fenêtre se déplace sur l'objet O en un seul essai (p"2 et e"2) avec confirmation de S" (stockage définitif).
- Dans le cas contraire, c'est S qui est élue et le SNH produit et mémorise une nouvelle Situation S''' acquise par Tâtonnement dirigé de façon similaire à l'acquisition de la Situation S".
Cette modélisation de l'apprentissage humain suggère les définitions suivantes des termes "émotion", "conscience" et "rêve".
Les propositions de travail qui suivent restent à approfondir et à valider.


Proposition :
L'émotion est un objet mental servant de soupape de sécurité aux divagations de le pensée.
Elle agit sur le système nerveux selon trois étapes successives : 1- Enregistrement : l'émotion colore toute situation en mémoire qui n'a pas réussi à s'accommoder au réel. 2- Déclenchement : la pensée, lorsqu'elle est en conflit avec le réel, réactive l'émotion contenue. 3- Manifestation : l'émotion, lorsqu'elle est pleinement exprimée, ramène le système à un état de base, sans pensée conflictuelle ni émotion induite. L'émotion serait donc au coeur des fonctions Tâtonnement dirigé et Représentation.
Sources :
- Svâmiji disait : La toute première perception de l'homme dans sa vie, ce qu'il voit dès qu'il ouvre les yeux, est considérée par son mental comme stable dès le début. Tout objet existe pour lui. En s'y associant constamment, il s'y attache. Il croit que toutes ces choses existent et vont continuer à exister. Il ne veut pas accepter que quoi que ce soit puisse être perdu (...) Alors il cherche la cause de cette obscurité qui est souffrance, de cette dépression qui est la mort. C'est alors qu'il apprend à voir. [ROUMANOFF D., Svâmi Prajnânpad - Tome 3 Une synthèse Orient Occident, p.110, 111]
- L'émotion n'est rien d'autre que le produit ou le résultat de voir les choses autrement qu'elles ne sont. [PRAJNANPAD S., Ceci Ici A présent, p.327]
- C'est d'une attitude double que naît l'émotion : à la fois refus et désir. Refus de ce qui est, désir qu'il en soit autrement, selon notre bon plaisir. [DESJARDINS D., Petit traité, p.37]
- Toute réaction émotionnelle intérieure se produit non pas en fonction de causes extérieures mais en fonction d'un scénario interne qui capte la cause excitante extérieure. [PRAJNANPAD S., Lettres à ses disciples - Tome 1 L'art de voir, p.74]
- Il y a une pensée derrière chaque émotion (...) Sans pensée, il ne peut y avoir aucune émotion. [PRAJNANPAD S., L'éternel présent, p.216, 269]
- L'incertitude, l'événement attendu qui ne se produit pas, l'interruption du cours régulier des réactions, l'anticipation de l'incapacité de faire face à une situation imminente, voilà autant de facteurs qui semblent susciter émotion et stress. Une discordance réelle ou anticipée entre ce qui se produit et ce qui est attendu, entraîne des conséquences importantes... Il (le comparateur cognitif) compare les événements du monde réel avec les attentes d'origine interne. Quand il y a un écart suffisant entre les attentes et les événements, ou quand les prévisions sont celles de conditions très pénibles qu'il ne semble pas possible d'éviter, le comparateur cognitif provoque alors la décharge de substances chimiques appropriées. [NORMAN L., Traitement de l'information, p.655]
- Je suis tranquille, relativement en paix avec moi-même et mon entourage. Soudain, un fait, un geste, une parole me heurte : je réagis, et parfois du plus profond de moi, par l'émotion, pour expulser ce trouble et revenir à ma tranquillité première (...) l'émotion est devenue un puissant facteur d'unification. Que s'est-il passé ? Il s'est passé qu'avec l'émotion chauffée au rouge , une flèche d'énergie nous a traversés, rapide, brûlant tout sur son passage, annulant ego, conflit, volonté, incertitude et notre façon de mettre un nom sur toute chose : pour un temps, le courant des pensées associatives a cessé (...) Autre fait en faveur de l'émotion : elle est le test qui permet de se situer dans sa trajectoire vers une attitude plus équilibrée. [DESJARDINS D., Petit traité, p.44, 46, 49]
- Lorsqu'une émotion apparaît, laissez-la s'exprimer autant que possible, soyez avec l'émotion ou plutôt, soyez l'émotion, et elle s'épuisera rapidement. Alors, voyez pourquoi l'émotion est apparue. Elle est venue simplement parce que vous n'avez pas vu les faits comme ils sont. Alors essayez de voir quelle était la situation réelle et comment votre mental l'a interprétée ! [PRAJNANPAD S., Lettres à ses disciples - Tome 1 L'art de voir, p.59]
- Peut-on avoir une émotion stable ? Certainement oui. Ce n'est plus alors une émotion mais un sentiment. Une émotion ne peut jamais être stable. [PRAJNANPAD S., A B C d'une sagesse, p.126]
Proposition :
La conscience est un flot continu d'images mentales relatives à des situations à fort intérêt.
A chaque instant, le cerveau ne perçoit consciemment qu'une seule situation, celle de "plus grand intérêt" parmi l'ensemble des situations intéressantes assimilables à cet instant. L'intérêt d'une situation se mesure par rapport à des propriétés d'attirance (nouveauté, insatisfaction, ressemblance, habitude, incitation mentale...) et de répulsion (danger, saturation...). La conscience serait donc au coeur de la fonction Perception au service de la fonction Orchestration.
Sources :
Sur l'instant :
- Nous sommes tout à fait convaincus d'être conscients de plus d'un objet à la fois, mais se pourrait-il que ce soit une illusion ? Le cerveau traiterait-il réellement plusieurs objets l'un après l'autre à une telle rapidité que cela nous donnerait une impression de simultanéité ? Peut-être pouvons-nous ne prêter attention qu'à un seul objet, puis nous souvenir brièvement de plusieurs d'entre eux. [CRICK F., L'hypothèse stupéfiante]
Sur la Nouveauté :
- Etre sensible, c'est prendre conscience du nouveau. [Anonyme]
Sur l'Insatisfaction :
- Ce que l'on a gagné devient inconscient, alors que ce que l'on a perdu vient à la conscience. Quand on perd une dent, la langue en prend conscience et se dirige vers le trou. Auparavant, elle n'y allait jamais ! [Anonyme]
Sur la Ressemblance :
- Il existe un lien secret ou union secrète entre certaines idées, qui fait que l'esprit les conjoint plus fréquemment ensemble et que l'une, sitôt qu'elle apparaît, amène l'autre. De là naît (...) ce fil ou cette chaîne de la pensée qu'un homme entretient naturellement même dans la rêverie la plus décousue. Ces principes d'association se réduisent à trois, à savoir : la ressemblance : un portait nous fait naturellement penser à l'homme qui y a été représenté. La contiguïté : quand on parle de Saint-Denis, l'idée de Paris vient naturellement à l'esprit. La causalité : quand nous pensons au fils, nous sommes enclin à porter notre attention sur le père. [HUME D., Abrégé du traité, p.87]
Sur le Danger (douleur) :
- Toutes les sensations ne se conservent pas. Seules les expériences douloureuses du passé se conservent (...) Pourquoi celles-ci seulement et pas les expériences agréables ? Parce que, dit Svâmiji (...) l'expérience du plaisir ne s'est pas fixée dans la mémoire, car elle s'est exprimée au moment où elle s'est produite sous forme de satisfaction." [PRAJNANPAD S.- Tome 1 Un maître contemporain, p.227, 228]
Sur l'Habitude :
- Lorsqu'on met ses habits le matin, on est très conscient de leur contact sur notre corps. Mais, après une courte période de temps, le système nerveux s'est habitué à cet ensemble particulier de stimulus qui perdent leur signification et on cesse d'être conscient de la sensation. [ROSE S., Le cerveau conscient, p.163]
Sur la Saturation :
- Beaucoup (de messages allant au cerveau) n'atteignent pas l'attention consciente, ou ils ne le font que lorsque se produit un changement de situation. Ainsi, lorsqu'on s'assoit..., la pression est enregistrée dans les fesses et le bas du dos. Au bout de peu de temps, l'information n'apparaît plus au niveau conscient. [ROSE S., Le cerveau conscient, p.128]
Sur la conscience de soi :
- Le fait que les personnes amputées, et les enfants auxquels manque à la naissance tout ou partie d'un membre, aient une perception et des souvenirs normaux suggère que l'image interne du corps constitue le référentiel unique pour les sensations corporelles conscientes, et de là, le fondement de la relation au monde extérieur. C'est cette relation qui fait que Moi et L'autre existent de façon distincte. [ROSENFIELD I., Pourquoi le cerveau, p.]

Proposition :
Le rêve est une activité nocturne imaginatrice qui cherche à satisfaire les situations insatisfaites du passé.
L'activité mentale consisterait à rebalayer les situations du passé qui n'ont pas réussi à s'accommoder au réel et à imaginer des solutions qui les satisfassent. Le rêve serait donc au coeur de la fonction Tâtonnement dirigé au service de la fonction Représentation.
Sources :
- La nuit porte conseil. [Proverbe]
- Freud pense que l'homme heureux n'a pas besoin de rêves, le réel suffit à le satisfaire. [CYRULNIK B., Un merveilleux malheur, p.200]
- Là où il n'y a plus conflit du tout, l'esprit n'a plus besoin de rêver. [KRISHNAMURTI J., Se libérer, p.96]
- On rêve toujours pour compléter quelque chose. Quelque chose qui n'a pas été accompli pendant le jour se complètera dans un rêve, car le mental a une tendance à tout compléter. [Anonyme]
 Dernière mise à jour de la page : 29 décembre 2023.
Dernière mise à jour de la page : 29 décembre 2023.